
ドローン空撮[技術解説] - ブラシレスジンバル組み付け中


マルチコプター空撮の歴史で、記憶に留めるべきパーツが発売されました。
0 [Zero]では動画対応の2.0kgクラス以下のジンバルを総入れ替えします。
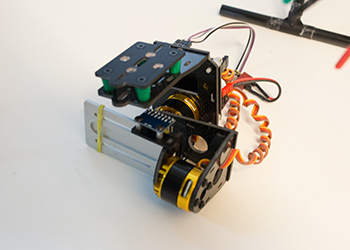
主役はTarot製の2軸ジンバルです。
2013年6月27日に、Tarot GoPro 2 Axis Brushless Gimbalがジャイロと共に2セット海外通販から到着しました。
朝から、組み付けと調整。
モード切替とチルトを含む簡易テストも完了しました。
ハードとソフトを1日触った印象としては・・・
「感動的な造りの良さ」と高い評価を残します。
設計者はとても良いセンスをしています。
ハードウェアは合理的。
比較的ソフトなダンパーを圧縮で使うのは十分なテストを行っている証拠。
ソフトも、無駄な設定項目は省きつつ、実際の撮影で有効なポイントは押さえていると・・・
初期物にもかかわらず、貫禄すら感じます。
このジンバルから、マルチコプター空撮の世代は変わったと言って良いでしょう。
填まりやすいポイントから
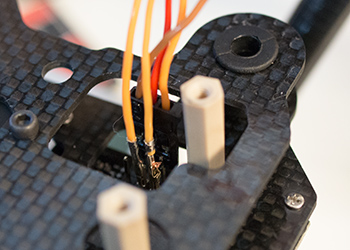
チルト・ロール・モードが送信機から操作出来ます。
ラジコン器機の常識とは異なる、少しクセのある配線となります。
チルト: Tのピン1本
受信機から信号(フタバ=白:JR=橙)を引き込みます。
マイナスとプラスは使わないので外してください。
←写真では手前の左側が該当します。
ロール: Rのピン1本
信号を入れなければ水平を保ちます。
ここは使わなくても良いでしょう。
使う場合はTのピンの左側を用います。(基板にはRの印字)
モード: Cのピン1本 ソフト上はRC mode :C
モードは以下の2種類
・Mode1:
・Mode2:
このモードの違いは動画などで、説明した方がわかりやすいところです。
文章ではうまく伝わりません。
しかし・・・とても重要な設定項目です。
ここを使わないと、このボードの機能の半分を捨てる事を意味します。
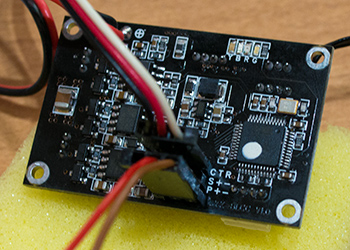 基本的にはコネクタは専用に加工しなければなりません。
基本的にはコネクタは専用に加工しなければなりません。簡単なのは市販のコネクタからピンを抜いてしまうこと。
軽量化に拘るなら自作。
TRCの3種の信号線を、ひとつのコネクタにまとめて、受信機付近で分岐というのが設計者の狙いかも知れません。
フタバ3本コネクタは左からC(モード切替)・T(チルト)・R(ロール)
受信機には信号線(フタバ=白:JR=橙)として1本のみ接続。
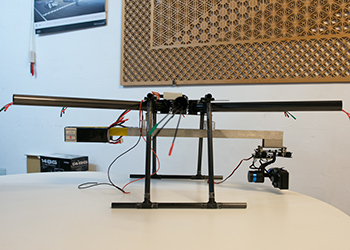
そのジンバルは低く遠くへ。
GoProはナローでも90°の画角です。
ワイドなら170°という、とんでもないワイドレンズを搭載しています。
通常の搭載位置なら、緩い前進でもプロペラが映り込んでしまいます。
これを避けるにはこの様に極端に前の低い位置に搭載するしか方法がありません。
やはり、放射型のヘキサやオクトではGoProに不向ですね。
ラダーのクアッドが最適なフレームです。
GoProはその画角から、「寄ること」「絶対の水平」「水平から真俯瞰への繋ぎ」など、通常のカメラとは違ったワークで画を組み立てる必要があります。
必要とされる画からフレーム形状も算定するべきです。
なお、このフレームはブラシレスジンバル+GoPro用として事前に用意した物。
この搭載方法でも振動が発生しないようなフレーム補強がされています。
※衝撃吸収機構はレス
銀色の部分はアルミではありません。
「制振マグネシウム合金」の一つ、M1マグネシウム合金です。
フレームは初期プロトとなることから、軽量化などの配慮はされていません。
バッテリーの搭載位置と、フレームによる減衰性能が判明してから軽量化は着手します。
コラム:Tarotのブラシレスジンバルとは?
今回取り上げたTarotのジンバルが定番ジンバルになると予想します。
従来ラジコンとは違う世界のエンジニアが開発には絡んでいます。
例えば、チルト制御のピン配置・・・
あれはラジコンに馴染んだエンジニアでは組まない設計です。
ホビーのロボットなのか、産業ロボットなのか・・・
どちらにしても、ラジコン関係の機材の開発が長い方ではありません。
ラジコンの世界では無駄とわかっていてもフタバコネクタで無駄な線を含めて信号線を引き回すのが常識。
その常識を捨てている時点で、今までのエンジニアとは大きく異なります。
配線なども、必要とする電流量から適切に判断し、必要以上に太い配線での引き回しを嫌っています。
制御関係のピンの引き出し位置も、機体全体で配線の合理化を計りたいという意志が伝わります。
比較対象として面白いのがDJI。
あちらはラジコン業界の古い常識に縛られつつ、「市場でフォームウェアを試す」という、PC業界の悪しき慣習を真似ています。
流用対策なのか、無駄な配線の引き回しも日常。
触っていて気持ちの良いモノではありません。
TarotとDJIのGoPro向けジンバルの設計の大きな相違点がチルト制御のモーターの方向。
Tarotは向かって右側。
DJIは向かって左側。
どちらが正しいかはHERO3の映像出力コネクタの位置を考えれば出てきます。
普通に考えれば、Tarot式が正解でしょう。
DJI式では映像を吸い出すケーブルがスムーズなジンバル動作にマイナス要素となります。
なお、Tarotはソフトもハードも既に3軸化の準備が完了しています。
いつでも、3軸ジンバルは登場可能。
3軸の設計は既に完了していて、その簡易版の2軸から発売したととれました。
そう遠くない時期に、安価且つ高性能なTarot3軸ジンバルが登場します。
このタイミングで、0 [Zero]も次のステップに進みます。
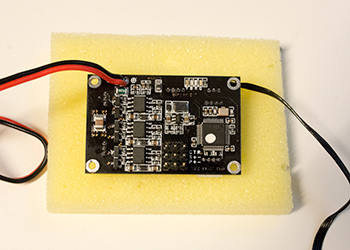
 ←実は・・・
←実は・・・
このブラシレスジンバルも購入していました。
技術解説にも登場しなかったと言う事は・・・それほど、感心しなかったのです。
実務に投入するには明らかに信頼性が劣るというジンバルでした。
一昔前のジャイロで、初期の3Dを経験した方ならわかるかと思いますが・・・
「制御を止めてしまう瞬間」があります。
これが瑕疵なのかセッティングなのかを見極めることが短時間では出来ませんでした。
とっ言うよりも・・・洗練されていない事から、あまりかかわりたくないが本心です。
この信頼性を上げる為に時間を掛けるなら、高価でもDJIのGoProジンバルで良いかと・・・様子見をしていました。
※もちろん、今ではTarotで行きます!
これからも、ブラシレスジンバルは各所から出てくることでしょう。
しかし・・・評価軸の中心に置くべきジンバルはTarotです。
私(0 [Zero]の開発担当兼パイロット主任)は大昔に産業ロボットの開発者でした。
その頃の上司が私に言った言葉にこういうのがありました。
「歴史は5%の天才がつくる・・・」
※その5%はエンジニアの中でという意味。
つまり・・・
普通のエンジニア20人は優秀なエンジニア1人に劣るという話でした。
ラジコン器機の開発者には、「普通の方」と、「優秀な方」が存在します。
このジンバルの設計士は間違い無く後者。
Tarotのジンバルの出来は感動的なレベルです。
採用をおすすめします。
最終更新日:2013/06/28
ドローン空撮[技術解説] 関連リンク
142) 【特願D】宅配ドローンヘリポート
141) 宅配ドローン着陸姿勢と特願A
140) 宅配ドローン理想重心機と特願A
139) ドローンのデザインとは?
138) バッテリー初期不良の原因特定
137) DJI純正バッテリーの自己放電確認テスト
136) 5機目のDJI PHANTOM2
135) DJIは信用出来るのか?
134) 2016年のDJIクオリティの確認
133) 宅配ドローン実証機制作 その3 特許と許可申請
132) 宅配ドローン実証機制作 その2
131) 宅配ドローン実証機制作 その1
130) 航空法改正
129) 【特願A】実フライトテストNo1
128) 「ドローンから落下させる」機構制作とテスト
127) ドローンの飛行時間について
126) ゲインとは?
125) 首相官邸屋上のドローン落下事故に関して
124) リポバッテリーの検査方法
123) GoProのNDフィルタに関して
122) ホワイトハウス無人機墜落に関する推測
121) 特許出願機の実体化
120) 墜落原因の報告義務について
119) 危険な業者の判断方法
118) 注文者責任のとらえ方の変化に関して
117) マルチコプターが旅客機を墜落させる
116) マルチコプター全面禁止というシナリオ
115) マルチコプター墜落原因の解析について
114) GPSハッキング
113) 管理責任者の表示
112) フライト総重量の明示
111) 湘南国際マラソン墜落事故を考える
110) 雨とリチウムポリマーバッテリー
109) DJI lightbridge テスト開始
108) DJI Phantomd純正プロペラの評価
107) T-MOTOR Antigravity MN2214の評価 その2
106) SUNNYSKY Xシリーズの評価 その2
105) 大型機とFPVの解禁
104) 「螺旋下ろし」で安全な機体回収
103) 固定ピッチのメリットとデメリット おすすめ
102) 3Dプリンタ打ち出し部品を信じるな!
101) 3Dプリンタとマルチコプター
100) 技術解説100ページの区切
99) マルチコプターとPL法
98) スチール撮影用マルチコプター入門
97) リポバッテリー内部検査の理由
96) T-MOTOR Antigravity MN2214の評価
95) SUNNYSKY Xシリーズの評価
94) フルスクラッチマルチコプターのススメ
93) SONY SEL1018は、マルチコプター空撮に使えるか?
92) Amazon Prime Air
91) α7とα7R
90) 動画撮影前提のマルチコプターフライトテクニック
89) 航空法第二条
88) リポバッテリー充電ステーション設計中
87) マルチコプタージャマーについて
86) 空撮屋必修の書籍 :「一般気象学」 おすすめ
85) 電波障害の再検証
84) 空撮会社のノートパソコン
83) マルチコプター空撮機材車
82) 選別落ちリチウムポリマーバッテリーの例
81) プロペラバランスを極める
80) 機材車増車
79) 受注制限に関して
78) ブラシレスジンバル【1.0kgクラス】 業務投入開始
77) ブラシレスジンバル・最初の2週間
76) 1.0kgクラスのジンバル交換
75) 「GoPro HERO3 + ブラシレスジンバル」初フライト
74) ブラシレスジンバル組み付け中
73) パソコンの高性能化により、機体を軽量化?
72) モーターを使い切るノウハウの公開 おすすめ
71) 黎明期から成長期に入ったマルチコプター空撮
70) 夏場の駐車車内の温度上昇対策
69) 「社員パイロット」の責任範囲
68) 「幽かな彼女」ワーク解説
67) マンション眺望撮影専用機体の開発開始
66) コンパクトデジカメの可能性
65) 「フライト重量」は重要な技術スペック
64) 1.0kgクラス・最初の1ヶ月
63) AR.Drone 【屋内ハル】の流用
62) 1.0kgクラス4モーター フレーム再設計
61) 1.0kgクラス4モーター開発経過
60) 屋内限定業務用クアッドコプター開発開始
59) ハンディーカムCX430V導入
58) DJI Wookong-MのGPSアンテナ
57) DJIの品質は大丈夫なのか?
56) フタバ14SGは空撮送信機の定番と成り得るか?
55) サイバーショットDSC-WX200発表
54) リチウムポリマーバッテリーの短絡テスト おすすめ
53) 「科捜研の女」2時間スペシャル撮影例
52) 軽量マルチコプターにベストなカメラは?
51) GTOスペシャルのワーク解説
50) リチウムポリマーバッテリー考察
49) 変電所付近での電波障害
48) ノーファインダー撮影が基本
47) DJI Wookong-Mの暴走原因の特定完了
46) 墜落テスト[2.0kgクラス 6モーター 2012年12月編]
45) DJI Wookong-Mの最新ファームに関して
44) AR.Drone 2.0はブロの撮影に使えるか?
43) プロペラ接触危険率 おすすめ
42) 2.0kgクラス高機動タイプ [Ver2] 開発中
41) 2012年夏のマルチコプター墜落の解説 【このページにて原因の特定説明】
40) 「受注見合わせ」と、「フライト制限」に関して
39) 重量級テスト機体の処分
38) マルチコプターに関する特許出願の内容
37) オクトコプター初フライト
36) 「人物接写空撮」とは?
35) 「2.0kgクラス 6モーター」第一期大規模改修完了
34) 「引きのカット」のカメラ角度について
33) 軽量マルチコプターだから出来ること
32) 0 [Zero]の機体が軽く精度が高い理由
31) マグネシウム合金が理想的なマルチコプターフレーム材
30) 6モーターは危険?安全?
29) 8モーターが安全な理由
28) 4モーターが危険な理由
27) DSLR搭載機開発の一時凍結
26) 初のマルチコプター空撮業務の解説
25) マルチコプターの事故と注文者責任 おすすめ
24) 降雪時のマルチコプター空撮サンプルとは?
23) エクストリーム空撮
22) プロペラバランス
21) リチウムポリマーバッテリー
20) マルチコプターの防振対策
19) JR XG8 本採用
18) モーターテスト用ベンチ制作
17) GoPro HE HERO2 専用ジンバルの試作例
16) 機体設計の方向性
15) ラピド工房
14) DJI Wookong-Mは最新ファームによりトラブル解決
13) αゲルとジンバル
12) 空撮ムービー撮影にフルサイズ一眼は必要なのか?
11) バルーン空撮屋の都合
10) DJI WooKong MとJR・DMSS2.4GHzとの相性?
9) DJI WooKong Mの初期不良確定
8) 犯人はコントローラー?受信機?
7) DJI WooKong Mのトリムズレ
6) 上空フライトテスト
5) 離陸から撮影までの所要時間
4) 実務を想定した弱風条件の動画撮影
3) 1号機にカメラ搭載
2) 最初の一週間
1) マルチコプターの導入