
ドローン空撮[技術解説] - フルスクラッチマルチコプターのススメ

X8形式の軽量オクトコプターの開発が進んでいます。
この制作経過を紹介しつつ、フルスクラッチマルチコプターのメリットをご紹介します。
0 [Zero]の実務に用いてる機体は、全てフルスクラッチ(自社設計・自社製造)です。
2014年現在では、安価な市販品が数多く出回っています。
それにも、関わらずフルスクラッチに拘るのには理由があります。
◆フルスクラッチのメリット
・軽量
・信頼性が高い
・汎用性が高い
◆フルスクラッチのデメリット
・市販品よりも高価
デメリットは、このくらいしか思いつきません。
例えば、墜落事故などが発生しまった際に、事故規模を小さくする観点から制作されているフレームヒューズ。
参照: 墜落テスト[2.0kgクラス 6モーター 2012年12月編]
この様な配慮がされている市販品はありません。
このフレームヒューズなどは、フルスクラッチのメリットの好例です。
このページでは、フルスクラッチならではの苦労と魅力に関して、実際の制作物を元に紹介していきます。
X8オクトコプター
この機体のコンセプト
カメラ・ジンバルで1.5kg搭載可能。
可能な限り軽量且つ実務に対応した機体
最初期のテスト機ですので・・・
特に技術的な目標はありません。
このテスト機から発展しない場合もあり得ます。
もちろん、設計段階で、「行ける!」という確信の元に製作は着手しています。

モーターコントローラー:HiModel 12A
過去2年間は、このモーターコントローラーを中心に使っていました。
・入手性が良い
・内部が目視出来る
・トラブルが少ない
モーターコントローラーの搭載位置はパイプ内になることが多いのですが、夏期のトラブルなどの経験もありません。
ただし・・・過去に変電所付近でモーター停止という経験が複数あります。
この原因となっている可能性は否定出来ません。
どこかで、別のコントローラーを搭載し障害テストを実施します。
選択肢は常に軽量であること
Wookong_Mから5Vは給電されることから、モーターコントローラーのBEC電源は不要になります。
つまり・・・Wookong_Mから信号さえ渡れば良いことになるので、電源ケーブルは削除します。
今回の機体では8個のモーターコントローラーを用います。
この配線の撤去で5g程度の軽量化が出来ました。
配線の設計 その1
今回の機体では、モーターコントローラーはフレーム内に埋め込みます。
この機体は完成後に、特定の業務に投入される可能性があります。
その際に、露出配線では不都合であることから・・・メンテナンス性は落ちる事を承知の埋込設計になります。
ただし・・・
可能な限り、信頼性は保ちたいところ。
具体的には、モーターコントローラーの発する熱を意識した設計を心がけます。
このパイプの両端に4個のモーターが付きます。
4個用いるコントローラーの中で2個は、この位置に埋め込みます。
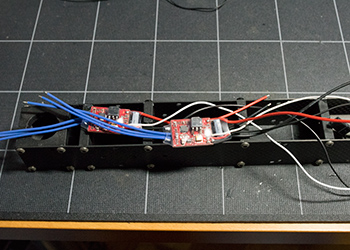
配線の設計 その2
残りの2個は、この位置に埋め込みます。
左端のクランプにパイプが取りつけられます。(そこに2個)
パイプは市販のラジコンヘリコプターテールパイプからの流用。(汎用カーボンパイプに都合の良いサイズが存在しないことから)
カーボン版は、セミオーダー品からの切り出し。
クランプはラピド工房の物を用いています。

シリコンケーブル
主要部品の配置が決まりましたので、配線に入ります。
←これが、シリコンケーブル専用のケース。
22AWG~14AWG程度のシリコンケーブルが豊富にストックされています。
シリコンケーブルの太さ選択にも設計者の技量が問われるところです。
太いほどドロップは減るが機体は重くなる。
軽量なマルチコプターを極めようとすると、この壁に当たります。
スペック選定には、ベンチと向き合うと出てきます。
定格・最大の両面から稼働時間・外気温などを整えながら必要にテストを実施しています。
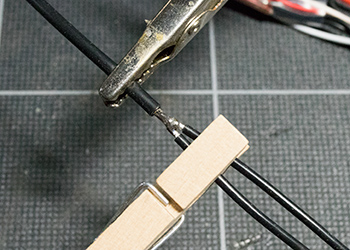
ハンダ付け
太い方から細い方に分岐するイメージになります。
細い方がモーターコントローラーへの給電。
太い方がバッテリー側になります。
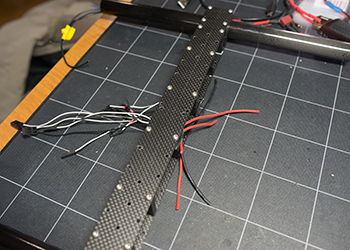
今回のフレームはラダー型になります。
2個セットで配線はまとめられて、最終的に4本の線を1本にまとめます。
半田付けの腕前は、経験に比例します。
制作のプロと比較すれば・・・マダマダといった腕前ですね。
見た目重視のフレーム
サンドイッチ構造のラダーフレーム内には、カーボンパイプが配されています。
これは、配線とモーターコントローラーを隠すのが主目的です。
売り物では無いので、美観はソコソコで良いのですが・・・
今回の機体は、重量増を承知でカバーを取りつけます。
パイプのみで強度を出すという方向も一考の価値があります。
細かな仕様は、テストを繰り返して突き詰めるところなので、今の段階では深く考えていません。
この設計レベルまで詰まっているなら実体化してフライトテストに入る事を優先します。
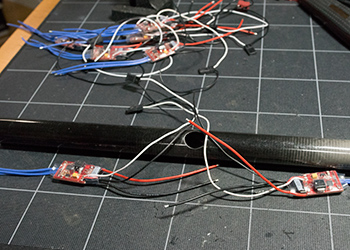
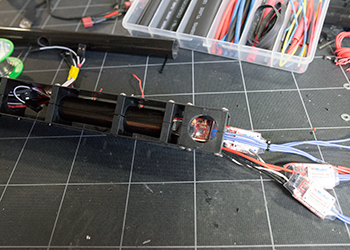
主要な配線完了
フレームとモーターコントローラーの配線が完成しました。
写真左側が進行方向です。
つまり、カメラの取付側。
その重量を打ち消す為に、右側(後ろ)にバッテリーが搭載されます。
比較的珍しい、ラダーフレームのX8・オクトコプターです。
ここまでは、常識の範囲の設計。
ここから先が・・・面白くなるのですが、今の段階では公開はココまでです。
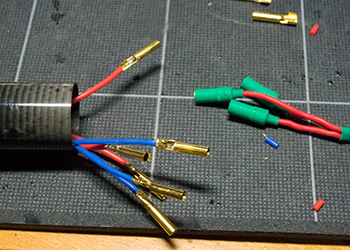
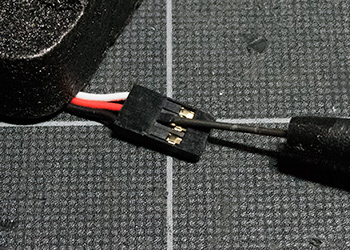
コネクタの軽量化
モーターとコントローラーは、直結がベストです。
ロスは無く、軽量化という観点からも完璧。
しかし・・・
メンテナンス性という観点からは、ここまで攻めることは出来ません。
ならばどうするかの答えがコレです。
写真右のコネクタは、このクラス(2.0kg)では一般的なゴールドコネクタです。
比較すると・・・随分と小さいことがわかります。
この位置のコネクタは数が多いことから、軽量化の観点からは極めて有効です。

ネジ類の最適化
ネジは、今の段階では仮組です。
フレームは、素材の厚み・補強点の位置・モーターの特性から共振を誘発することがあります。
この共振には、様々な対策方法があるのですが、もっとも手軽な方法がネジの交換です。
例えば20個のチタンネジを用いて共振が出ているとします。
この半分をエンジニアプラスチックに交換。
その振動を計測して・・・
この様な事を繰り返しながら、共振ポイントを外していきます。
同じ長さで、ステン・チタン・マグネシウム・エンジニアプラスチックを使い分けるのが、2014年現在の0 [Zero]のスタンダードです。
まとめ:フルスクラッチマルチコプターのススメ

フルスクラッチは、確かに手間はかかります。
しかし・・・信頼性という観点からは、市販品とは別次元である事もわかって頂けるかと思います。
ここで、もう一度、「フルスクラッチのメリット」のおさらい
・軽量
・信頼性が高い
・汎用性が高い
マルチコプターは、トラブル時の即日墜落性という観点からは最悪の飛行物体です。
従来型ヘリコプターや飛行機などては、モーターが止まってしまってもベテランパイロットならある程度の安全が保証されます。
しかし・・・マルチコプターでは、小さなトラブルも墜落の可能性が高まります。
その一方で、機械的には極めて単純なラジコンです。
つまり・・・
少ない労力で、信頼性は上げる事が出来るラジコンと言えます。
「少ない労力」つまり・・・フルスクラッチ(パーツの選別・内部検査)です。
フレームからの切り出しなど、大変と言うかも入れませんが・・・
従来型ラジコンのヘッド回りの設計と比較すれば、まさにホビーレベルの工作です。
カーボンの切り出しレベルを全ての方に望むのは困難です。
そこで検討頂きたいのがキットからの制作です。
ご自身(パイロット)が責任を持って組み立て。
ここまでは、なんとか頑張って欲しいところです。
もしも、完成品で空撮業務をして事故が発生したとします。
メーカーが組み立てたラジコンのネジが緩んだことに起因して墜落したとしましょう。
それでも、責を問われるのはパイロットです。
この様な事故の場合も、余程のことが無い限りは保険金が支払われる事でしょう。
しかし・・・
その結果は、巡り巡って保険金の上昇という具体的な形で現れます。
この様な事が多発すると、保険その物が入れないという事も想定する必要が出てきます。
ポイントとなるのは、事故を起こしていない方も保険に入れなくなるという事です。
保険は、リスク(保険金の支払額)から開発されます。
保険会社側が、マルチコプター空撮は分が悪いと感じれば、商品は無くなります。
技術の無い方の安易な空撮参入は、結果として様々な方に迷惑を掛けることになります。
例としてひとつ紹介します。
何年か前にホビーのラジコンヘリコプター完成機を購入しました。
これを、購入時から手直し無しにフライト。
普通のホバリング程度は問題無し。
しかし・・・機体に負担がかかる3Dを行うと3フライトでネジ緩みで上空でバラバラになりました。
その時に、他人が組み立てた機体は信頼が出来ないと痛感しました。
国内のプロが使う事が多い、某メーカーの機体も・・・
同業者が用いている機体を、私がチェックしたところでは、イエローカードといえる組み立ての瑕疵と設計ミスが無数。
繰り返しのフライトで墜落原因と成り得るレッドカードが2ヶ所。
確かに初期ロットではあったのですが・・・
人前で飛ばしてはいけないというレベルであったことを鮮明に覚えています。
※0 [Zero]所有の機体では無いので、詳細は控えさせて頂きます。
趣味レベル(飛ばす場所がラジコン飛行場)なら、ここまでの気遣いは不要です。
しかし・・・
業務で空撮を行うなら、ご自分で責任が取れる機体にて業務をお願いします。
最終更新日:2014/01/23
ドローン空撮[技術解説] 関連リンク
142) 【特願D】宅配ドローンヘリポート
141) 宅配ドローン着陸姿勢と特願A
140) 宅配ドローン理想重心機と特願A
139) ドローンのデザインとは?
138) バッテリー初期不良の原因特定
137) DJI純正バッテリーの自己放電確認テスト
136) 5機目のDJI PHANTOM2
135) DJIは信用出来るのか?
134) 2016年のDJIクオリティの確認
133) 宅配ドローン実証機制作 その3 特許と許可申請
132) 宅配ドローン実証機制作 その2
131) 宅配ドローン実証機制作 その1
130) 航空法改正
129) 【特願A】実フライトテストNo1
128) 「ドローンから落下させる」機構制作とテスト
127) ドローンの飛行時間について
126) ゲインとは?
125) 首相官邸屋上のドローン落下事故に関して
124) リポバッテリーの検査方法
123) GoProのNDフィルタに関して
122) ホワイトハウス無人機墜落に関する推測
121) 特許出願機の実体化
120) 墜落原因の報告義務について
119) 危険な業者の判断方法
118) 注文者責任のとらえ方の変化に関して
117) マルチコプターが旅客機を墜落させる
116) マルチコプター全面禁止というシナリオ
115) マルチコプター墜落原因の解析について
114) GPSハッキング
113) 管理責任者の表示
112) フライト総重量の明示
111) 湘南国際マラソン墜落事故を考える
110) 雨とリチウムポリマーバッテリー
109) DJI lightbridge テスト開始
108) DJI Phantomd純正プロペラの評価
107) T-MOTOR Antigravity MN2214の評価 その2
106) SUNNYSKY Xシリーズの評価 その2
105) 大型機とFPVの解禁
104) 「螺旋下ろし」で安全な機体回収
103) 固定ピッチのメリットとデメリット おすすめ
102) 3Dプリンタ打ち出し部品を信じるな!
101) 3Dプリンタとマルチコプター
100) 技術解説100ページの区切
99) マルチコプターとPL法
98) スチール撮影用マルチコプター入門
97) リポバッテリー内部検査の理由
96) T-MOTOR Antigravity MN2214の評価
95) SUNNYSKY Xシリーズの評価
94) フルスクラッチマルチコプターのススメ
93) SONY SEL1018は、マルチコプター空撮に使えるか?
92) Amazon Prime Air
91) α7とα7R
90) 動画撮影前提のマルチコプターフライトテクニック
89) 航空法第二条
88) リポバッテリー充電ステーション設計中
87) マルチコプタージャマーについて
86) 空撮屋必修の書籍 :「一般気象学」 おすすめ
85) 電波障害の再検証
84) 空撮会社のノートパソコン
83) マルチコプター空撮機材車
82) 選別落ちリチウムポリマーバッテリーの例
81) プロペラバランスを極める
80) 機材車増車
79) 受注制限に関して
78) ブラシレスジンバル【1.0kgクラス】 業務投入開始
77) ブラシレスジンバル・最初の2週間
76) 1.0kgクラスのジンバル交換
75) 「GoPro HERO3 + ブラシレスジンバル」初フライト
74) ブラシレスジンバル組み付け中
73) パソコンの高性能化により、機体を軽量化?
72) モーターを使い切るノウハウの公開 おすすめ
71) 黎明期から成長期に入ったマルチコプター空撮
70) 夏場の駐車車内の温度上昇対策
69) 「社員パイロット」の責任範囲
68) 「幽かな彼女」ワーク解説
67) マンション眺望撮影専用機体の開発開始
66) コンパクトデジカメの可能性
65) 「フライト重量」は重要な技術スペック
64) 1.0kgクラス・最初の1ヶ月
63) AR.Drone 【屋内ハル】の流用
62) 1.0kgクラス4モーター フレーム再設計
61) 1.0kgクラス4モーター開発経過
60) 屋内限定業務用クアッドコプター開発開始
59) ハンディーカムCX430V導入
58) DJI Wookong-MのGPSアンテナ
57) DJIの品質は大丈夫なのか?
56) フタバ14SGは空撮送信機の定番と成り得るか?
55) サイバーショットDSC-WX200発表
54) リチウムポリマーバッテリーの短絡テスト おすすめ
53) 「科捜研の女」2時間スペシャル撮影例
52) 軽量マルチコプターにベストなカメラは?
51) GTOスペシャルのワーク解説
50) リチウムポリマーバッテリー考察
49) 変電所付近での電波障害
48) ノーファインダー撮影が基本
47) DJI Wookong-Mの暴走原因の特定完了
46) 墜落テスト[2.0kgクラス 6モーター 2012年12月編]
45) DJI Wookong-Mの最新ファームに関して
44) AR.Drone 2.0はブロの撮影に使えるか?
43) プロペラ接触危険率 おすすめ
42) 2.0kgクラス高機動タイプ [Ver2] 開発中
41) 2012年夏のマルチコプター墜落の解説 【このページにて原因の特定説明】
40) 「受注見合わせ」と、「フライト制限」に関して
39) 重量級テスト機体の処分
38) マルチコプターに関する特許出願の内容
37) オクトコプター初フライト
36) 「人物接写空撮」とは?
35) 「2.0kgクラス 6モーター」第一期大規模改修完了
34) 「引きのカット」のカメラ角度について
33) 軽量マルチコプターだから出来ること
32) 0 [Zero]の機体が軽く精度が高い理由
31) マグネシウム合金が理想的なマルチコプターフレーム材
30) 6モーターは危険?安全?
29) 8モーターが安全な理由
28) 4モーターが危険な理由
27) DSLR搭載機開発の一時凍結
26) 初のマルチコプター空撮業務の解説
25) マルチコプターの事故と注文者責任 おすすめ
24) 降雪時のマルチコプター空撮サンプルとは?
23) エクストリーム空撮
22) プロペラバランス
21) リチウムポリマーバッテリー
20) マルチコプターの防振対策
19) JR XG8 本採用
18) モーターテスト用ベンチ制作
17) GoPro HE HERO2 専用ジンバルの試作例
16) 機体設計の方向性
15) ラピド工房
14) DJI Wookong-Mは最新ファームによりトラブル解決
13) αゲルとジンバル
12) 空撮ムービー撮影にフルサイズ一眼は必要なのか?
11) バルーン空撮屋の都合
10) DJI WooKong MとJR・DMSS2.4GHzとの相性?
9) DJI WooKong Mの初期不良確定
8) 犯人はコントローラー?受信機?
7) DJI WooKong Mのトリムズレ
6) 上空フライトテスト
5) 離陸から撮影までの所要時間
4) 実務を想定した弱風条件の動画撮影
3) 1号機にカメラ搭載
2) 最初の一週間
1) マルチコプターの導入