
ドローン空撮[技術解説] - 【特願A】実フライトテストNo1

ヒモ付きドローン。
この最適解を0 [Zero]が示します。
注意:
特許出願済 【国際出願番号:PCT/JP2015/64381】
このページの機体は、国際特許出願済みとなっています。

初フライト完了 [2015年9月1日]
秋雨前線の影響から雨が続きます。
バルーン・ドローン共に業務空撮は天候待ちへ
溜まっていた画像加工も一段落したことから機体開発を再開しました。
溜まっていた開発案件から手を付けたのは、【特願A】搭載機。
数ヶ月前に95%程度の完成度のまま放置されていました。
この機体を半日ほどの調整作業後に初テストフライトを実施。
このアングルからは、「少し形状が独特のラダーフレーム機」と見えるかと思いますが・・・
数年後に振り返ると、特定ジャンル(このページの下部にて)のドローンの始祖となる機体です。
【特願A】のおさらい
「揚力と重心を一致させる」
これが、【特願A】の基本的な構造です。
信頼性が大幅に高まる他に、最高速引き上げや積載物の荷重変化対応などの付加機能も発生します。
この【特願A】を、ヒモ付きドローンに用います。
まずは、普通のドローンにヒモを付ける事によるデメリットを示します。
・ヒモの絡まり
・高度変化によりゲイン変化発生
・余剰浮力の減少
【特願A】は、上記のデメリットを低減するのに効果的です。
ヒモの取付点は物理的に下げられる事から絡まりのリスクが少なくなります。
高度があがるとヒモの自重が増えます。この様な時にも物理的にゲイン変化が発生しません。
また、モーターの最大負荷が低減されることから余剰浮力も一般機体よりも余裕があります。
一言で言うと、「ヒモが絡まりにくくゲイン変化が発生しない」
これが、【特願A】を用いたヒモ付きドローンの特徴です。

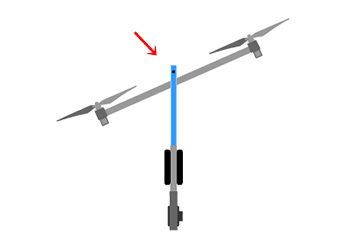
ドローンの理想モデル
←これが、強風下でホバリングしている際の姿勢です。
GPSアンテナ(白い部分)に注目してください。
この様な姿勢になっても、GPSアンテナは水平に保たれることから安定した受信感度が期待出来ます。
傾きが発生しないことから、輻射波やジャマー対処方法の引き出しも増やせます。
ジャイロ(GPSアンテナから数cm下の位置)は、重心点と完全な一致が可能。
この様なジンバル構造により、コントロールユニットにオフセットが発生しません。
これらが、「ドローンの理想モデル」とする根拠です。

最大負荷を想定したフライトテストが必要
←全速後退姿勢。
平均風速10m/sを保証すると仮定すると、この程度の傾きまで想定する必要があります。
10m/sは強すぎると言う方もいるかと思いますが・・・
地上が風速5m/sで上空10m/s超は都内などでも普通にある条件です。
この機体の場合は、強風時のヒモの扱いを含めた運用ノウハウの蓄積が大切であると考えています。
フライトテストの結果

今の段階では、大きな問題も新たな発見もありません。
フライト回数を重ねて運用ノウハウを積み重ねるという段階です。
本日の所はジンバル部分に用いている3D打ち出し部品の一部に強度不足が判明。
設計を改めて明日以降もテストを実施します。
なお、今回は、「ヒモ付き」として設計されていますが、【特願A】が本領を発揮するのは地上給電タイプの機体です。
ヒモよりも電線の方がゲイン変化は自ずと大きくなります。
機体側からバッテリー重量が軽減されることになるために、このゲイン変化は無視出来ないレベルに達します。
運用する高度により限界は決まるのですが、数時間というレベルで同じ場所に留まる必要のある業務では、モーター間の負荷が均一化されるという【特願A】の特徴も生きてきます。
0 [Zero]は、バルーンを用いたマンション眺望撮影のスペシャリスト。(都内の主要な高層タワーマンションに多く納入)
数年後に実現される、マンション眺望撮影専用ドローンの最初の試作機がこれとなります。
15階以下のマンション眺望撮影のボリュームゾーンでは、地上給電+【特願A】がもっとも合理的な機体であると考えています。
20階以上のタワーマンションは、給電電圧の昇圧も必要となることから開発には時間が掛かることでしょう。
最終更新日:2015/09/01
ドローン空撮[技術解説] 関連リンク
142) 【特願D】宅配ドローンヘリポート
141) 宅配ドローン着陸姿勢と特願A
140) 宅配ドローン理想重心機と特願A
139) ドローンのデザインとは?
138) バッテリー初期不良の原因特定
137) DJI純正バッテリーの自己放電確認テスト
136) 5機目のDJI PHANTOM2
135) DJIは信用出来るのか?
134) 2016年のDJIクオリティの確認
133) 宅配ドローン実証機制作 その3 特許と許可申請
132) 宅配ドローン実証機制作 その2
131) 宅配ドローン実証機制作 その1
130) 航空法改正
129) 【特願A】実フライトテストNo1
128) 「ドローンから落下させる」機構制作とテスト
127) ドローンの飛行時間について
126) ゲインとは?
125) 首相官邸屋上のドローン落下事故に関して
124) リポバッテリーの検査方法
123) GoProのNDフィルタに関して
122) ホワイトハウス無人機墜落に関する推測
121) 特許出願機の実体化
120) 墜落原因の報告義務について
119) 危険な業者の判断方法
118) 注文者責任のとらえ方の変化に関して
117) マルチコプターが旅客機を墜落させる
116) マルチコプター全面禁止というシナリオ
115) マルチコプター墜落原因の解析について
114) GPSハッキング
113) 管理責任者の表示
112) フライト総重量の明示
111) 湘南国際マラソン墜落事故を考える
110) 雨とリチウムポリマーバッテリー
109) DJI lightbridge テスト開始
108) DJI Phantomd純正プロペラの評価
107) T-MOTOR Antigravity MN2214の評価 その2
106) SUNNYSKY Xシリーズの評価 その2
105) 大型機とFPVの解禁
104) 「螺旋下ろし」で安全な機体回収
103) 固定ピッチのメリットとデメリット おすすめ
102) 3Dプリンタ打ち出し部品を信じるな!
101) 3Dプリンタとマルチコプター
100) 技術解説100ページの区切
99) マルチコプターとPL法
98) スチール撮影用マルチコプター入門
97) リポバッテリー内部検査の理由
96) T-MOTOR Antigravity MN2214の評価
95) SUNNYSKY Xシリーズの評価
94) フルスクラッチマルチコプターのススメ
93) SONY SEL1018は、マルチコプター空撮に使えるか?
92) Amazon Prime Air
91) α7とα7R
90) 動画撮影前提のマルチコプターフライトテクニック
89) 航空法第二条
88) リポバッテリー充電ステーション設計中
87) マルチコプタージャマーについて
86) 空撮屋必修の書籍 :「一般気象学」 おすすめ
85) 電波障害の再検証
84) 空撮会社のノートパソコン
83) マルチコプター空撮機材車
82) 選別落ちリチウムポリマーバッテリーの例
81) プロペラバランスを極める
80) 機材車増車
79) 受注制限に関して
78) ブラシレスジンバル【1.0kgクラス】 業務投入開始
77) ブラシレスジンバル・最初の2週間
76) 1.0kgクラスのジンバル交換
75) 「GoPro HERO3 + ブラシレスジンバル」初フライト
74) ブラシレスジンバル組み付け中
73) パソコンの高性能化により、機体を軽量化?
72) モーターを使い切るノウハウの公開 おすすめ
71) 黎明期から成長期に入ったマルチコプター空撮
70) 夏場の駐車車内の温度上昇対策
69) 「社員パイロット」の責任範囲
68) 「幽かな彼女」ワーク解説
67) マンション眺望撮影専用機体の開発開始
66) コンパクトデジカメの可能性
65) 「フライト重量」は重要な技術スペック
64) 1.0kgクラス・最初の1ヶ月
63) AR.Drone 【屋内ハル】の流用
62) 1.0kgクラス4モーター フレーム再設計
61) 1.0kgクラス4モーター開発経過
60) 屋内限定業務用クアッドコプター開発開始
59) ハンディーカムCX430V導入
58) DJI Wookong-MのGPSアンテナ
57) DJIの品質は大丈夫なのか?
56) フタバ14SGは空撮送信機の定番と成り得るか?
55) サイバーショットDSC-WX200発表
54) リチウムポリマーバッテリーの短絡テスト おすすめ
53) 「科捜研の女」2時間スペシャル撮影例
52) 軽量マルチコプターにベストなカメラは?
51) GTOスペシャルのワーク解説
50) リチウムポリマーバッテリー考察
49) 変電所付近での電波障害
48) ノーファインダー撮影が基本
47) DJI Wookong-Mの暴走原因の特定完了
46) 墜落テスト[2.0kgクラス 6モーター 2012年12月編]
45) DJI Wookong-Mの最新ファームに関して
44) AR.Drone 2.0はブロの撮影に使えるか?
43) プロペラ接触危険率 おすすめ
42) 2.0kgクラス高機動タイプ [Ver2] 開発中
41) 2012年夏のマルチコプター墜落の解説 【このページにて原因の特定説明】
40) 「受注見合わせ」と、「フライト制限」に関して
39) 重量級テスト機体の処分
38) マルチコプターに関する特許出願の内容
37) オクトコプター初フライト
36) 「人物接写空撮」とは?
35) 「2.0kgクラス 6モーター」第一期大規模改修完了
34) 「引きのカット」のカメラ角度について
33) 軽量マルチコプターだから出来ること
32) 0 [Zero]の機体が軽く精度が高い理由
31) マグネシウム合金が理想的なマルチコプターフレーム材
30) 6モーターは危険?安全?
29) 8モーターが安全な理由
28) 4モーターが危険な理由
27) DSLR搭載機開発の一時凍結
26) 初のマルチコプター空撮業務の解説
25) マルチコプターの事故と注文者責任 おすすめ
24) 降雪時のマルチコプター空撮サンプルとは?
23) エクストリーム空撮
22) プロペラバランス
21) リチウムポリマーバッテリー
20) マルチコプターの防振対策
19) JR XG8 本採用
18) モーターテスト用ベンチ制作
17) GoPro HE HERO2 専用ジンバルの試作例
16) 機体設計の方向性
15) ラピド工房
14) DJI Wookong-Mは最新ファームによりトラブル解決
13) αゲルとジンバル
12) 空撮ムービー撮影にフルサイズ一眼は必要なのか?
11) バルーン空撮屋の都合
10) DJI WooKong MとJR・DMSS2.4GHzとの相性?
9) DJI WooKong Mの初期不良確定
8) 犯人はコントローラー?受信機?
7) DJI WooKong Mのトリムズレ
6) 上空フライトテスト
5) 離陸から撮影までの所要時間
4) 実務を想定した弱風条件の動画撮影
3) 1号機にカメラ搭載
2) 最初の一週間
1) マルチコプターの導入