
ドローン空撮[技術解説] - ブラシレスジンバル【1.0kgクラス】 業務投入開始

1.0kgクラスに、ブラシレスジンバルを搭載。
最初の業務が完了しました。
撮影データの公開許可を頂いてるので、それを用いて解説します。
・報道番組
・現場は、天井崩落事故が発生した富士水泳場
・撮影当日は、プールサイドなどへの立入禁止
・1.0kgクラスのブラシレスジンバル搭載後の初仕事
・天井撮影を想定し、カメラ搭載位置は極端な前位置(前加重)
・フライトはノーファインダー(最大フライト距離・水平70m)
・GPS・FPV未搭載
この動画はこの日の一連の撮影の中で最初の室内撮影となります。(このシーン以前に屋外実景撮影は完了)
プールサイドへの立入は禁止となっている事から、関係者全てが崩落地点付近の現状を知らない状況です。
以上から、「取りあえず」という撮り方をしています。
このフライトを元に「ココに、もう少し寄って!」などの指示を頂き、本番用の撮影に入ります。
この業務は通常以上の安全配慮が必要であることから、パイロットとしては、「攻めていません」
接触を想定したガードは装着していますが十分すぎるほどの安全距離を確保してフライトさせています。
「取りあえず」の撮り方なので、各パートでの画造りは雑です。
パイロットの狙いを中心に以下で解説します。

1:パイロットポジション
現場の指示から、この場所から外に出ることは出来ません。
天井が落ちている場所はパイロットの位置から直線距離で40~50m。
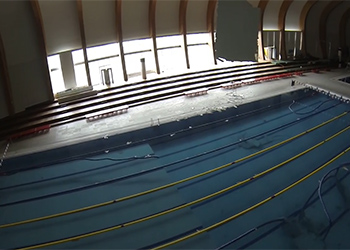
長水路(50m)のプール全景をルーズに撮る為に、パイロットから70m程度の距離まで飛ばすことになります。
なお、画像転送装置(FPV)は搭載していません。
パイロットはいつもどおりノーファインダーで飛ばしています。
今後、画像転送装置を採用しても、この業務ではノーファインダーで飛ばすべき条件です。
※フライトディレクターが画像転送装置の画像を見ながらパイロットに指示を出すのがベスト。
撮影時はプール内の照明は消えています。
壁面の窓から外光(曇り)は入るという条件です。
天井付近では低めの光量であることから、数年前のカメラでは厳しい条件です。
しかし、機体の目視には問題無い光量が確保されています。

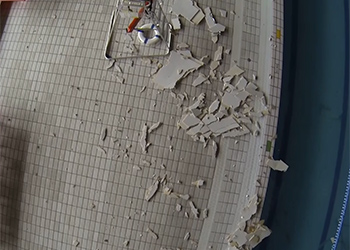
2:最初の目標へ 0:00~0:17
パイロットから監視塔までの距離は45m。
監視塔の手前側に落ちている落下物を撮る為に、真俯瞰にチルトさせて機体は真っ直ぐに目標に向かいます。
映像転送装置を用いずに、目標直上に位置できるのは機体とパイロットの能力から。
しかし、パイロットから40m以上も離れると、精度は甘くなります。
ドラマ撮影などで、演者に寄る必要がある場合は10m以下の距離が望ましいところです。
3:最初のワーク 0:17~0:24
監視塔から手前に移動すると、落下物の多くが撮影出来る事になります。
「映像の速度感」を計る為に、それなりの速度で引きます。(速度は早い=本番フライトでは修正)
パイロットの位置からは地上のカメラにて望遠レンズの撮影も行います。
実景以外の寄りのカットに関してはこの地上からのカメラ方向を配慮しつつ撮影します。
例えば・・・「光源は向かって左側の位置として揃える」などです。
得に指示が入るわけでは無いのですが当然の事と考えます。

4:水面は時間差で 0:25~0:42
次は水面からスタートして落下物というワークを組み立てます。
報道向けのワークではありませんが・・・試します。
低空で水面上をホバリングすると波紋が広がります。
この波紋は前進をすれば切ることが出来ます。
尺の長さを想定しながら助走距離を持ちつつ水面をなめて、監視塔で決めるというワークを試します。
この様な無数のワークを提示して、「本命」とするワークを丁寧に撮ることになります。
5:ポジション移動 0:43~1:05
ここからは次の目標までの移動時間。
真俯瞰から俯瞰にチルト角をセットして、右の崩落壁へ移動。
ラダーに「カクッ・カクッ」と操作を入れて、カメラの角度を調整しているのが見て取れます。
パイロットとしては、「休憩時間」です。
なお、実景などで旋回をする場合には滑らかな操作を行います。
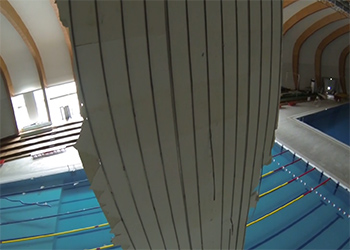
6:崩落壁「ルーズ」ワーク 1:06~1:05
崩落部分の壁に入る~寄る~離れつつ旋回。
この様な簡易的なワークを即興で組みました。
軽量鉄骨が見える裏側から撮るのはこの撮影の趣旨からは当然のところです。(地上のカメラからは捉えられない)
先ほどの移動中と比較すると、ラダー操作はスムーズに行っている事が映像からもわかります。
詳細に書いていると大変なので、以下はポイントのみを解説します。

7:GoPro特殊逆光条件 1:47付近
「中央部重点」と言えば良いのでしょうか?
GoProが光量の変化に「良く付いている」事はわかりました。
室内から屋外などのワークに、この特性は有効です。
もちろん・・・この仕事ではこの位置からの逆光は使い物になりません。
この様なカメラ毎の特性は空撮会社側で把握すべきところです。
時間があれば同じワークをクロップで試したいところですが時間の限られている業務空撮ですので割愛しています。
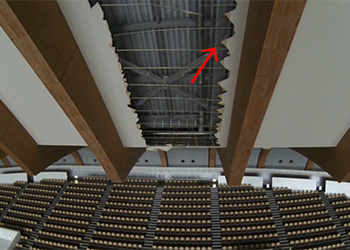
8:マルチコプター空撮の必要性はあったのか? 2:21付近
今回の撮影を、「調査目的」として捉えると、価値があるのはこの付近の撮影となります。
この矢印の位置は構造材の形状から地上のカメラから捉える事の出来ない場所です。
結果としては重要なイベントが発生していない事から、意味は無かったとなるのですが・・・
調査目的の案件次第では何かを決定づける手段と成り得ます。
![0 [Zero]は建築物に強い](img/13072312.jpg)
9:0 [Zero]は建築物撮影に強い 2:34付近
0 [Zero]はバルーン空撮のトップブランドです。
バルーン空撮ではマンション眺望撮影の他、各種調査空撮が業務となります。
様々な建築物や計画を、色々なタイミンクで撮る機会が多いことから、マルチコプター空撮の映像撮影に携わる会社としては例外的に建築に関する知識が蓄積されています。
この付近で狙っていたのは、「落ちなかった部分の現状」です。
この様な素材は編集時には助かる物です。
![0 [Zero]は建築物に強い](img/13072313.jpg)
10:サ~と飛ばして、「ふわっ」と撮って
3:30付近から、突如として天井付近に飛んでいきます。
これは「キャットウォーク付近から、真下を撮って」と指示が入ったからです。
「サ~」と予定位置まで飛ばして、真俯瞰にチルトさせているのが映像からわかります。
これ以外にも、最初のワークでは現場からの、「この辺りを撮って」という指示でフライトさせています。
その付近まで、「サ~」と飛ばして、ワークを即興でつくっているのが一連の動画からはわかると思います。
ブラシレスジンバルの使いこなし
今回の業務は、ブラシレスジンバル搭載の1.0kgクラスとしては初となります。
2.0kgクラスに関してはこれ以前に初の業務は完了しています。
このページを書いている2013/07/23の段階で、Tarotのブラシレスジンバルの購入数は7個。
画質向上と運用上の理由から、補助部品も多数購入しています。
なお、この業務に用いたシンバルはいつも通りに「選別」と、「調整」がされています。
購入直後のポン付けでは無い事に注意して下さい。
ポン付けでも十分な性能が出ますが・・・ここまで、シャープな解像を非改造では出せません。
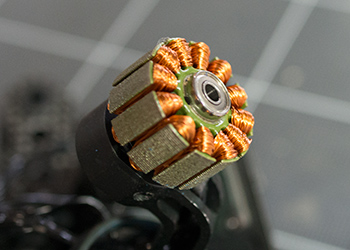
内部の具体的な改修に関してはノウハウとなることから非公開。
外部から伺い知れる改修を中心に公開を開始します。
なお、この写真はチルト軸のベアリング。
動力用としてはあり得ないベアリングの収め方です。
この点からも、設計者は確信犯。
低コスト化の為に、ここをブッシュにするなどと言う設計も、いづれは登場する事でしょう。
0 [Zero]がここをどうしているかは・・・非公開となります。

弱点の改良
このジンバルの数少ない設計ミスと思えるところ。
それがカメラ取付パーツのM2キャップボルトです。
上:ノーマルM2
下:改造M3
画質向上にはカメラの取付精度は重要なポイント。
しっかりと取りつけるという観点からも、ここの改修は有効です。
なお、取付ネジは非スチールから選択することにより最低限の重量増で押さえられます。
この日は純チタンネジを用いました。
純正(スチールM2キャップボルト)と比較すると、0.4gの重量増。
マグネシウムネジなどを用いると、M3化を行っても純正よりも軽量化が可能です。
ここは、「押さえ込み」を期待してチタンとしました。
なお、ネジの取付は純正と同じで後方から。
前からに改めると、運用は楽になるのですが・・・フィルターワークの点では不利になります。
このパーツの存在がDJI・H3-2DではなくTarotを選択した一つの理由です。
設計者は狙っていないと思いますがフィルターワークを行う上で、都合の良いパーツとなっています。

無難な軽量化
純正で防振システムが付いています。
システム重量から察するに、完全なオーバークオリティの部分です。
素材を薄くして、作り替えという方向もあるのですがまずは無難に軽量化します。
ここで、5.9gの軽量化。
GoPro搭載機の、この場所の1gは効いていきます。
カメラ搭載位置を1mmでも進める為に、今後も軽量化は必要です。
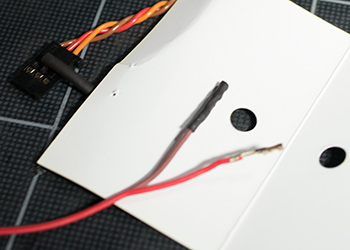
コネクタも不要
この機体ではジンバルの電源供給に専用線を引き回していません。
純正のハーネス(赤黒)は基板から撤去。
そして、コントロール線も、画像のような最低限の物を用います。
繰り返しとなりますがGoProのワイド端を使い切るには軽量化=カメラの前進搭載 が必須です。
機体後方部分の軽量化はそれほど神経質になる必要はありません。
コラム:「機材」から、「パイロット」という時代へ

矢印の位置がパイロットのポジション位置。
天井材全体に、崩落の危険性があることから、ここからプールサイドに出ることは出来ません。
当然ですがGPSも受信できません。(非搭載)
当日は天井撮影(水平から上方向)が想定されたことから、カメラがいつも以上に前方に付いています。
バランスが取りきれなかったことから前過重。
これを起因として、ラダー方向が甘くなっています。
業務が決まってから、現場到着までは約10時間。
機体の整備(本命機にブラシレスジンバル新規搭載=該当機2台体制作)と移動が必要である事から、この日の睡眠時間は2時間程度。
現場にて、「画像の迫力」(崩落部分への寄り)よりは、「絶対の安全」のご指示を頂いています。(業務によっては墜落まで攻めます。)
この前提で、話は進めます。
4万円のカメラと2万円のジンバルで、この映像は撮影されてます。
カメラ搭載位置からワークに制約はありますがDJIファントムでも同様な撮影は可能と思われます。
つまり・・・
一式20万円で、これに近い撮影は可能な時代になりました。
過去の技術解説【黎明期から成長期に入ったマルチコプター空撮】にも似たような事を書いていますが映像の美しさという観点からは横並びという時代に入ります。
この機体の様に、カメラ搭載位置や安全性に特化させるというスペシャル機体の需要は今後もあります。
しかし、機体以上に大切なのはパイロットの腕という時代に確実に入りました。
このコラムでは、「パイロットの腕」を取り上げます。
各所で拝見する映像から、感じた事を率直に書かさせて頂きますと・・・
「映像から狙いが読み取れない」
この様に感じます。(ごく僅かに、センスのある方は国内にも・・・)
明確な意志を持って、機体をフライトさせているというパイロットの狙いが映像から読み取ることが出来ないのです。
編集されて、公開(オンエア)されている映像から、そう感じるのですから・・・
素材レベルではその傾向が強いことは容易に予測出来ます。
このページの素材からはパイロットの意志が読み取れるかと思います。
この機体は画像転送装置を持たない2軸ジンバル搭載機です。
つまり、パイロットはカメラマンの役割を同時に担います。
1名体制で、画像転送装置も用いずに、2013年現在の1.0kgクラスで、ここまでの画を安定的に撮っています。
このレベルの難度なら・・・朝から晩まで50フライトは消化出来ます。
それほど、「息をしている程度」の難度であると、記させていたただきます。
このページは0 [Zero]にパイロットに応募しようと考えている方も見る事となります。
ここで、0 [Zero]の考えるパイロットの水準を記させて頂きます。
・今の業務で一流の能力がある
これが最低限の水準です。
フライト技術ウンヌンは・・・これ以降の話です。
どんなにフライト技術が高くても、総合的な実務能力が低い場合は最終的には使えるパイロットになりません。
今の仕事では将来厳しいな・・・という方では0 [Zero]のパイロットは務まりません。
パイロットとしての具体的な能力の話に入ります。
・空間認識能力が高い
これがパイロットとして最重要の才能です。
「運動神経が良い」よりも、「頭の回転が速い」方が向いています。
対象物を、どの方向から撮影すれば美しく撮れるか?
その時の、依頼者の狙いや、タイムスケジュールも配慮しつつ攻める(NGが出る率が高い)図太さも必要です。
デジタル一眼レフの撮影時に、「左目をつぶる」方はマルチコプター空撮のパイロットには向きません。
広いレンズを用いる場合は撮影高度の僅かな差でも、画は別物となってきます。
想定ワーク(平面)を、一通り行う。
チェックは平面的な距離と高度。ワーク間の速度など多岐に渡ります。
映像転送装置に頼る様なフライト技術では・・・
AからBへの移動速度は、「早く」
Bに移動中のチルトに入るタイミングは、「一呼吸遅く。同時にチルトは早く」
BからCの、「パンはさらにゆったりと」
この様な即時の現場判断は出来ません。
もちろん、時間の許す限り、より良い物を撮るという映像に対する貪欲さも必要です。
結果として、現場の映像撮影者がマルチコプター空撮には向いています。
「趣味でラジコンを飛ばしている」方が映像知識を身につけるよりも、「現役カメラマン」がマルチコプターの知識を付ける方が結果は出ます。
映像制作の一線で仕事をしていると言う事は・・・上記の空間認識能力は備えていることの証明となります。
コラム2:映像制作者向け「パイロット技術を身につける方法」
技術を身につけて、高い技術で、マルチコプターを仕事にと考えている映像関係者向けに、ご自身の育成方法として以下を紹介します。
このコラムは現状で映像制作に携わっている(または予備軍)方を想定して書かれています。
現在のお仕事をしながら、1年程度で技術習得完了を目安として考えました。
・1年目の予算として、50万円を用意
・毎日15分のシミュレーター練習時間の確保
・月に4回の、ラジコン飛行場でのフライト
マルチコプターは日々進化しています。
マルチコプターは実際に仕事となる映像を撮り始めるタイミングで、機材の研究と購入を行えば十分です。
十分と言うよりも・・・中途半端なレベルで、マルチコプターに手を出してはダメです。
早期にマルチコプターを手にすると、確実に技術育成にはマイナスの方向に働きます。
とにかく、最初の一年目は基礎体力を付けるべきです。
2013年現在で、「意志を持たない作例」の作者はこの基礎体力(余裕)が不足しています。
以下のスケジュールはご自身の才能を客観的に測る事の出来る技術目標を想定しています。
そこが達成出来ないなら・・・一定水準の才能が無いとも書いています。
また、エンジンラジコンを推奨しています。
これらの基礎を習得するには実地の指導を受けるのが近道です。
もしも、知り合いにエンジンラジコンを日常的に飛ばしている方がいたら頼って下さい。
その様な方がいないなら・・・気分は乗らないかも入れませんがラジコンクラブの加入の方向で動いて下さい。
以下では映像制作に携わっている方という限定をつけて、「本気を出していただければ、3名中1名はこのページのサンプルを撮れるレベルに達すると推測します」と記しています。
それは以下の推奨スケジュール通りに実施した場合です。
ご自分の判断で、マルチコプターからスタートしたり、エンジンラジコンを割愛したなら・・・
「3名中1名」という部分は、「10名中1名」という単位まで落ちます。
なお、映像制作に携わっていない、ラジコン趣味の方を前提とすると・・・
「100名中1名」というレベルまで落ち込みます。
厳しい数字を示していると取られるかも知れませんが「3名中1名」という数値は相当に高い格率です。
それほどに、現場の映像制作者の空撮に対する可能性を、0 [Zero]では高く評価しています。
それでは具体的な育成スケジュールを示します。
◆1ヶ月目
・シミュレーターの購入
・シミュレーター上で、ホバリングの習得(1週間以内)
・シミュレーター上で、対面ホバリングの習得(3週間以内)
・シミュレーター上で、オートローテーションの習得(1ヶ月以内)
投資金額はラジコンシミュレーター代金として2万円で十分です。
そして、ホバリングからオートローテーションの習得のみに時間を使って下さい。
機体などはトイレベルを含めて、購入する必要はありません。
ご自身の才能を測る事に、最初の一ヶ月を使って下さい。
仮に、一ヶ月でオートローテーションまで辿りつけなかったなら・・・
ご自身に才能が無い事を意味しますので、諦めるべきです。
今後は一定水準の技術を身につけたプロが多くなることから、この一ヶ月目をクリア出来ないなら無駄な投資となります。
オートローテーションを、一ヶ月で習得できたなら・・・2013年現在の、普通のプロ以上の才能があなたにある事を意味します。
今までのお仕事の経験を活かせば、0 [Zero]のライバルとなる事が出来ます。
得意な分野に特化させれば、0 [Zero]以上の映像も撮れることでしょう。
最初の一ヶ月で、ご自身の才能を見極めます。
なお、「オートローテーションの成功」はフラフラとしつつも「ある程度の思った位置」なら成功とします。
シミュレーションに用いる機体はT-REX600(エンジン)などが良いでしょう。
「10回中5回は思った辺りに降りれれば合格」ここを判定ラインとして示します。
仮に、合格ラインに達しない物の、「趣味レベルで構わないから空撮をしたい・・・」と思っているなら、以下は割愛しても構いません。
対面ホバリングをクリアしているなら、趣味の空撮に入ってもモラルに反しないと思います。
シミュレーター上で、1ヶ月でオートローテーションまでクリア出来たなら、「才能がある」事を意味します。
以下の過程に関しては、ご自分の時間と予算の許す速度で進めて頂いて構いません。
ただし、どんなに急いでも、全ての過程をクリアするには半年は必要です。
※才能のある方が1日6時間平均で空撮練習(知識)に費やしたと過程。
◆2~3ヶ月
・30~50クラスの従来型エンジンラジコンを購入
・シミュレーターの継続
ここからはラジコンを実際に飛ばすというステージに入ります。
身近な模型店で、30~50の従来型エンジンラジコンヘリコプターを購入します。
ここはエンジンで無ければなりません。(安価な中古でOK)
重要なので赤で書きました。
ご自分の判断も、ラジコンショップの店員のアドバイスも、飛行場仲間のアドバイスも無視して下さい。
仮想ライバルが0 [Zero]ならば、この時点で手にするべきラジコンは、「エンジン機」です。
・舞台度胸
・安全に関するモラルの習得
この二点がエンジン機採用の理由です。
0 [Zero]と同等のワークを現場で行うにはエンジン機による十分なフライト経験が必要です。
繰り返します。「フライト技術の無い、第三者のアドバイスは無視して下さい」
エンジン機はマルチコプターよりも確実にパイロットにストレスが掛かります。
そのストレスが今後の為に必要です。
◆3ヶ月~
・3Dの基礎訓練開始
・シミュレーターの継続
・フリップが身につけば、このレベルの卒業
ここからは落として治すことが仕事になります。
湯水のごとく、費用を必要とする段階です。
無駄にお金は使いたくないなら・・・
シミュレーターを中心に訓練を行って下さい。
ただし・・・必ず、月に一度はラジコン飛行場にて、落とすまで飛ばして下さい。
この段階では3kg程度の機体が墜落すると、どの程度の事故となるのか?を身をもって知る必要があります。
なお、このレベルを卒業できれば・・・
0 [Zero]への売り込みが可能になります。
得に、マルチコプターによる動画撮影サンプルは必要としません。
本業の実績を用意して、0 [Zero]の門を叩いて下さい。
◆マルチコプターの購入
・シミュレーターの卒業
・450程度の従来型電動ラジコンの購入
・マルチコプターの購入
・画像転送装置は採用しないこと
お待たせしました。
フリップが出来るフライト技術を持って、基礎レベルの卒業です。
ここからはマルチコプターを用いた映像撮影の解禁となります。
エンジン機のメンテナンスにより、一定水準の制作技術も身についていることでしょう。
ご自分の判断で、マルチコプターは選択して構いません。
ただし、日々の訓練の相棒として、小型の従来型電動ラジコンも用意して下さい。(T-REX450クラス)
エンジン機はこの時点で処分しても構いません。
モーターにはエンジンと違ったノウハウが必要です。
意外かも知れませんが・・・電動ラジコンは危険です。
大ケガをしない為に、小型機から電動のノウハウを身につけていきます。
この段階でのポイントは画像転送装置を採用しないこと。
スチールカメラに例えると、ズームレンズに相当する画像転送装置の採用はパイロットの技術習得に悪い影響を与えます。
初めてのマルチコプター空撮から、このページサンプルを安定して撮れるレベルに達するまでは画像転送装置は使ってはいけません。
本当にセンスのある方なら、初日から・・・この映像に近い物が撮れるはずです。
つまり・・・画像転送装置が一ヶ月で解禁などという方も、出てくることでしょう。
このレベルまで達して「最初の一ヶ月にオートローテーションの習得」を、才能の判断に使ったことがわかって頂けると思います。
◆まとめ
この1年で、映像撮影の現場の方と仕事をする機会が増えました。
その方々の才能の高さを考えつつ、このコラムを記しています。
0 [Zero]が現場で、巡り会った方々の能力から察するに・・・
本気を出していただければ、3名中1名はこのページのサンプルを撮れるレベルに達すると推測します。
0 [Zero]としても、ライバルが増える事は良いことと考えています。
少なくとも、2013年現在の技術の伴わないプロは早期に駆逐されるべきと考えています。
5年後くらいにはこのサンブル程度は現場に常駐するスタッフの方が普通に撮ってくるという時代を希望します。
この事に限りませんが「出来ない方の意見」は参考にする必要がありません。
2013年現在で、これが撮れる0 [Zero]からのアドバイスとなります。
近道(マルチコプターからスタート)をすると、結果としては中途半端な技術レベルに「こぢんまり」とまとまることを意味します。
エンジン機による繰り返しの墜落経験が重大な事故の発生を食い止める優秀なパイロットの育成につながります。
最終更新日:2013/07/29
ドローン空撮[技術解説] 関連リンク
142) 【特願D】宅配ドローンヘリポート
141) 宅配ドローン着陸姿勢と特願A
140) 宅配ドローン理想重心機と特願A
139) ドローンのデザインとは?
138) バッテリー初期不良の原因特定
137) DJI純正バッテリーの自己放電確認テスト
136) 5機目のDJI PHANTOM2
135) DJIは信用出来るのか?
134) 2016年のDJIクオリティの確認
133) 宅配ドローン実証機制作 その3 特許と許可申請
132) 宅配ドローン実証機制作 その2
131) 宅配ドローン実証機制作 その1
130) 航空法改正
129) 【特願A】実フライトテストNo1
128) 「ドローンから落下させる」機構制作とテスト
127) ドローンの飛行時間について
126) ゲインとは?
125) 首相官邸屋上のドローン落下事故に関して
124) リポバッテリーの検査方法
123) GoProのNDフィルタに関して
122) ホワイトハウス無人機墜落に関する推測
121) 特許出願機の実体化
120) 墜落原因の報告義務について
119) 危険な業者の判断方法
118) 注文者責任のとらえ方の変化に関して
117) マルチコプターが旅客機を墜落させる
116) マルチコプター全面禁止というシナリオ
115) マルチコプター墜落原因の解析について
114) GPSハッキング
113) 管理責任者の表示
112) フライト総重量の明示
111) 湘南国際マラソン墜落事故を考える
110) 雨とリチウムポリマーバッテリー
109) DJI lightbridge テスト開始
108) DJI Phantomd純正プロペラの評価
107) T-MOTOR Antigravity MN2214の評価 その2
106) SUNNYSKY Xシリーズの評価 その2
105) 大型機とFPVの解禁
104) 「螺旋下ろし」で安全な機体回収
103) 固定ピッチのメリットとデメリット おすすめ
102) 3Dプリンタ打ち出し部品を信じるな!
101) 3Dプリンタとマルチコプター
100) 技術解説100ページの区切
99) マルチコプターとPL法
98) スチール撮影用マルチコプター入門
97) リポバッテリー内部検査の理由
96) T-MOTOR Antigravity MN2214の評価
95) SUNNYSKY Xシリーズの評価
94) フルスクラッチマルチコプターのススメ
93) SONY SEL1018は、マルチコプター空撮に使えるか?
92) Amazon Prime Air
91) α7とα7R
90) 動画撮影前提のマルチコプターフライトテクニック
89) 航空法第二条
88) リポバッテリー充電ステーション設計中
87) マルチコプタージャマーについて
86) 空撮屋必修の書籍 :「一般気象学」 おすすめ
85) 電波障害の再検証
84) 空撮会社のノートパソコン
83) マルチコプター空撮機材車
82) 選別落ちリチウムポリマーバッテリーの例
81) プロペラバランスを極める
80) 機材車増車
79) 受注制限に関して
78) ブラシレスジンバル【1.0kgクラス】 業務投入開始
77) ブラシレスジンバル・最初の2週間
76) 1.0kgクラスのジンバル交換
75) 「GoPro HERO3 + ブラシレスジンバル」初フライト
74) ブラシレスジンバル組み付け中
73) パソコンの高性能化により、機体を軽量化?
72) モーターを使い切るノウハウの公開 おすすめ
71) 黎明期から成長期に入ったマルチコプター空撮
70) 夏場の駐車車内の温度上昇対策
69) 「社員パイロット」の責任範囲
68) 「幽かな彼女」ワーク解説
67) マンション眺望撮影専用機体の開発開始
66) コンパクトデジカメの可能性
65) 「フライト重量」は重要な技術スペック
64) 1.0kgクラス・最初の1ヶ月
63) AR.Drone 【屋内ハル】の流用
62) 1.0kgクラス4モーター フレーム再設計
61) 1.0kgクラス4モーター開発経過
60) 屋内限定業務用クアッドコプター開発開始
59) ハンディーカムCX430V導入
58) DJI Wookong-MのGPSアンテナ
57) DJIの品質は大丈夫なのか?
56) フタバ14SGは空撮送信機の定番と成り得るか?
55) サイバーショットDSC-WX200発表
54) リチウムポリマーバッテリーの短絡テスト おすすめ
53) 「科捜研の女」2時間スペシャル撮影例
52) 軽量マルチコプターにベストなカメラは?
51) GTOスペシャルのワーク解説
50) リチウムポリマーバッテリー考察
49) 変電所付近での電波障害
48) ノーファインダー撮影が基本
47) DJI Wookong-Mの暴走原因の特定完了
46) 墜落テスト[2.0kgクラス 6モーター 2012年12月編]
45) DJI Wookong-Mの最新ファームに関して
44) AR.Drone 2.0はブロの撮影に使えるか?
43) プロペラ接触危険率 おすすめ
42) 2.0kgクラス高機動タイプ [Ver2] 開発中
41) 2012年夏のマルチコプター墜落の解説 【このページにて原因の特定説明】
40) 「受注見合わせ」と、「フライト制限」に関して
39) 重量級テスト機体の処分
38) マルチコプターに関する特許出願の内容
37) オクトコプター初フライト
36) 「人物接写空撮」とは?
35) 「2.0kgクラス 6モーター」第一期大規模改修完了
34) 「引きのカット」のカメラ角度について
33) 軽量マルチコプターだから出来ること
32) 0 [Zero]の機体が軽く精度が高い理由
31) マグネシウム合金が理想的なマルチコプターフレーム材
30) 6モーターは危険?安全?
29) 8モーターが安全な理由
28) 4モーターが危険な理由
27) DSLR搭載機開発の一時凍結
26) 初のマルチコプター空撮業務の解説
25) マルチコプターの事故と注文者責任 おすすめ
24) 降雪時のマルチコプター空撮サンプルとは?
23) エクストリーム空撮
22) プロペラバランス
21) リチウムポリマーバッテリー
20) マルチコプターの防振対策
19) JR XG8 本採用
18) モーターテスト用ベンチ制作
17) GoPro HE HERO2 専用ジンバルの試作例
16) 機体設計の方向性
15) ラピド工房
14) DJI Wookong-Mは最新ファームによりトラブル解決
13) αゲルとジンバル
12) 空撮ムービー撮影にフルサイズ一眼は必要なのか?
11) バルーン空撮屋の都合
10) DJI WooKong MとJR・DMSS2.4GHzとの相性?
9) DJI WooKong Mの初期不良確定
8) 犯人はコントローラー?受信機?
7) DJI WooKong Mのトリムズレ
6) 上空フライトテスト
5) 離陸から撮影までの所要時間
4) 実務を想定した弱風条件の動画撮影
3) 1号機にカメラ搭載
2) 最初の一週間
1) マルチコプターの導入