
バルーン夜景空撮[技術解説] - 夜景撮影テスト5回目

今回の夜景撮影テストでは過去最大の改良が二点入っています。
◆尾翼の強化 13)強風対策=尾翼強化
◆撮影システムの設計変更と軽量化 16)軽量化 -213.1g
本来なら、テスト結果の検証の為には、「1回の改良で1回のテスト」とすべきです。
結果が良くなっても、悪くなっても複数の改良点がある場合はどちらがどのような影響があるかがわからないためです。
しかし・・・
梅雨明け後で実務の数が増えてきたことから、テストも出来なくなってきました。
複数の改良ポイントがありますがテストを強行します。

今回の尾翼は過去に最も成績の良かった追加尾翼仕様の強化版=10)空力再設計3回目(一部帆は撤去)です。
過去に制作している尾翼でもっとも長い=効力の高い 尾翼です。
←設計のベースとなったタイプ
同時に12)夜景撮影テスト4回目の反省としてカーボン材の強化がされています。
また、テストの意味を含めて50cmほど延長をされています。
結果として50gほど重くなっていますが今後の調整はカーボン棒を短くすることにより行うので軽く方向性に動きます。
サンプル1:低高度

これがD700によるバルーン夜景空撮の記念すべき最初のカットです。
夜景撮影のベストの時間帯と言える日没直後に撮影を行っています。
テスト加工の為、バルーンや繋留ハーネスの消去をしていません。
リアルなテスト画像をご覧下さい。
これでも・・・
商品レベルの画質ではありません。
ソフトウェアの選定とセッティングの余地は多い状態です。
同じ撮影画像でも、今後の改良でさらに良くなります。
サンプル2:中高度
実務の中心となるタワーマンションのパノラマ撮影を想定したテストです。
撮影素材しては完璧と呼べるクオリティです。
夜景CubicVR撮影を開発目的としていたので・・・
「目標達成」を宣言します。
テスト結果:垂直尾翼は要改良。撮影システムは完成度が高い

この日は二ヶ所の改良を同時に行っていました。
垂直尾翼に関してはさすがに長すぎました。
テスト当日は風速2m以下の条件でしたがピッチングが出てしまいました。
水平尾翼の取付点は過去で最も後端です。
ここに問題があったようです。(長すぎる尾翼は×)
垂直尾翼に関しても、このテストの翌日に行われた実務(風速10mクラス)でも、長すぎて結果が良くないという確認が取れました。
尾翼に関しては予定通り短い方向への改良が入ります。
撮影システムに関しては90点と評価できます。
設計変更により画質が一段と良くなりました。
今後の撮影システムは同じ傾向の設計で進めることになります。
なお、撮影システムの細かい設計内容は非公開となります。
新たな問題の発生
ニコンD700の投入により、撮影機材に関する問題は解決しました。
バルーン本体も、十分な性能になってきました。
撮影システムも軽量化と同時に施された設計変更はさらにプレの少ない画像を出してきます。
ここまでは当初の予定通りの性能向上です。
しかし・・・
このタイミングであらたな問題が出てきています。
それはVR加工を行うソフトと加工を行う人材のスキルです。
◆以下のサンプルは私(開発者)が画像加工を行っています。
サンプル1(CubicVR)
繋留ハーネスとバルーンの消去。完全なノイズ対策は行っていませんが加工精度と色調調整は業務レベルです。
◆以下のサンプルはカメラマン(バルーンシステム制作者)が画像加工を行っています。
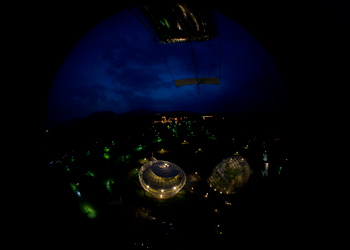
フルーツ公園 夜景テスト
基本的にはカメラマンが加工・色調調整を行っています。(水銀灯の対応は指示済み)
二つのサンプルの違いは光源の見極めと色調の経験値です。
夜景空撮は究極のミックス光により構成されています。(カメラマン泣かせ)
撮影時と加工時に、この光源により色調のバラツキを如何に押さえるかが腕の見せ所ととなります。
また、現在VR加工に用いている最新のソフトは自動化されているのですが・・・
夜景に弱いという弱点も見えてきました。
CubicVRの加工に用いたソフトは基本設計は5年前のソフトを用いています。
完全なマニュアル制御によるステッチソフトです。 (社内では私しか使えない)
今後はソフト回りの改修も平行して進めることになります。
最終更新日:2013/01/07
夜景バルーン空撮開発 関連リンク
25)2015年現在の夜景バルーン空撮の現状
24)2012年現在の夜景バルーン空撮の現状
23)初夜景テスト キヤノン5D MarkⅡ
22)キヤノン5D MarkⅡ導入
21)開発中間報告
20)空撮専用車両の改造
19)WT-4の落とし穴
18)ニコンWT-4導入
17)夜景撮影テスト5回目
16)軽量化 -213.1g
15)軽量化 -27g
14)ニコンD700導入
13)強風対策=尾翼強化
12)夜景撮影テスト4回目
11)夜景パノラマ空撮カメラ?
10)夜景撮影テスト3回目
9)夜景撮影テスト3回目
8)墜落撮影機材の修理
7)墜落撮影機材のダメージ
6)臨時対風テスト=大失敗
5)空力再設計2回目
4)夜景撮影テスト2回目
3)空力再設計1回目
2)夜景撮影テスト1回目
1)世界初のCubicVR撮影を!