
ドローン空撮[技術解説] - 8モーターが安全な理由

はじめに
このページは、2012/03/05に公開が開始されています。
基本的には、その当時のままで公開されています。
それ以降に判明した事柄などは加筆させて頂いきます。
オクトコプターとは?
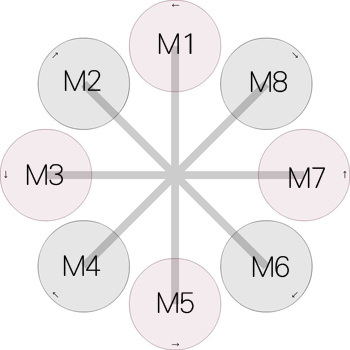
8個のモーターでプロペラを回転させるプロ用機体の基本形です。
安定性・信頼性の観点から、この構造よりも圧倒的に勝ると言う形状は物理的にあり得ません。
今後も、ブロ機体の基本形と考えて良いでしょう。
モータ系トラブルに強い事が最大の魅力です。
「墜落の可能性を、現実の選択肢の中で可能な限り下げたい」なら、この機体を選ぶ事が無難です。
1系統ダウンでも何事も無かったかのように飛行する事も
マルチコプター墜落の原因のひとつがモーターとモーターコントローラーのトラブルに起因する一系統ダウン。
このトラブルが発生しても、オクトコプターは墜落しません。(モーターに余力がある場合に限り)墜落しにくドローンです。
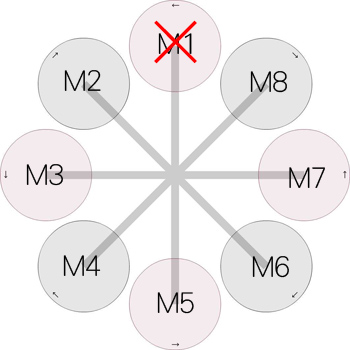
1):M1が能力低下
2):機体バランスを保つ為に、M2とM8が回転を上げる
3):失った反動トルクと揚力を回復する為に、M3・M7が回転を上げる
4):機体バランスを保つ為に、M4とM6は絞られる。
5):変則ヘキサコプター+としてフライト可能
M1が「弱く」なっている場合はM4・M5・M6以外のモーターを相対的に強くしバランスを取ります。
つまり、7個のモーターで十分な余力が確保されている場合は物理的に墜落する要素がありません。
これが安全面でオクトコプターが優れる理由です。
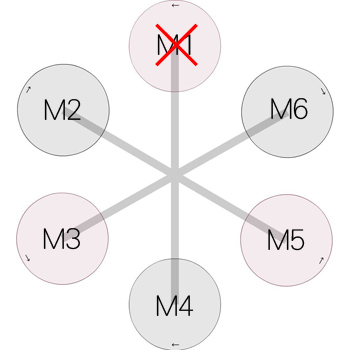
ヘキサコプターでは一系統ダウンで4モーター。 6-2=4モーター。もしくは、スピンを伴う5モーター。
一方のオクトコプターでは一系統ダウンで7モーター。 8-1=7モーター。
「矛盾しているのでは?」と思う方もいると思うので補足します。
オクトコプターで注目すべきポイントは対向するモーターは、「同じ方向に回転している」事。
ヘキサコプターは対向しているモーターが「逆回転」
この事から、ヘキサコプターでは一系統ダウンで反対側のモーターは出力を落とすことでしか反動トルクを打ち消すことが出来ません。
※ヘキサは一系統ダウンでピルエットに入る。
オクトコプターでは失った反動トルクを90度ずれた1セットのモーターにより回復することが容易に可能です。
ヘキサコプターの欠点は物理的に覆せない事。
重量級ヘキサコプターの、使用・開発・製造はマルチコプターを理解していないことの証明です。
なお、Y型ヘキサコプターは信頼性の点から、おすすめできません。
一系統ダウンの場所次第では即時墜落。
信頼性という観点からはY型ヘキサコプターの選択はあり得ません。
ただし、カメラの選択肢に関してはとても魅力があります。
画角の広いGoProや、全周フィッシュアイを用いるなら、面白い機体です。
ネイチャー系の撮影に関しては0 [Zero]も採用の可能性を残しています。
オクトコプターの隠れた問題点
オクトコプターは機構的には非常に優れています。
絶対に落とせない用途では魅力です。
一見、何も欠点が無いようなのですが・・・
メリットがそのままデメリットに成り得ます。
ひとつのモーターが弱くなっても、それに気がつきにくい。
十分な機体整備と、経験を積んでいる会社なら問題は少ないと思います。(それでも、注意が必要)
問題は「機体整備はプロに任せます」というレベルの空撮会社。
このレベルのプロはモーターがひとつ弱くなっても、「気がつけない」可能性があります。
気がつかないまま、1年間飛んでいた・・・などと言う事もあり得ます。(それくらい、余力のあるオクトコプターは構造的に安全)
0 [Zero]以外の空撮会社は軽量化の興味が少ない事から機体重量は重め。
一般的な、日本のオクトコプターなら、小さいカメラを搭載しても4.0kg以上。
これが人に降ってくれば・・・
当然ですが惨事となります。
オクトコプターは自身で機体整備と最低限のマルチコプターの仕組みがわかっている方のみが運用出来ると考えた方が良いでしょう。
コラム:オクトコプターを過信しない事
コラムに関しては、2012年春の公開時から全面的に書き換えました。
理由としてはオクトコプター採用の産業機にて、問題と感じる運用方法が目立ってきたからです。
産業機を開発・運用している方向けに述べることから難しい内容が多いかと思います。
不必要な方は読み飛ばしください。
加筆日:2016/02/05
誤解が無いように結論からお伝えします。
現在でも、オクトコプターは比較的安全なドローンです。
産業用途で迷ったならオクトコプターという選択は間違っていません。
ただし・・・
それを本当に、「マルチコプターで実現する必要があるのか?」をよく考えて採用しましょう。
明らかに、ガソリンラジコンヘリを用いた方が良い用途までオクトコプターを無理矢理採用している案件が見受けられます。
また、十分な根拠が示されないまま、重心可変が発生する機体も販売されています。
さらに、墜落などの際にも明確な墜落原因が示されないのも問題です。
どちらにしても、0 [Zero]は2016年現在の多くの産業機に疑問を抱いています。
それでは、本題に入ります。
自身がマルチコプターの上級者と感じているなら、以下の質問に答えてみてください。
Q1:
オクトコプターは1系統が止まった場合に、どのような条件まで墜落を避けることが出来ますか?
上級者なら、この質問に即答出来て当然。
答えは後ほど書かさせていただきますが、まずはご自身で答えてみてください。
さらに、質問を続けます。
Q2:
一系統のモーターが上空で止まったと仮定します。
その機体を呼び戻す際には、どのようなコントロールをすれば良いですか?
この質問は、オクトコプターを運用する全てのプロに答えていただきたいところ。
これが、答えられないなら業務運用は控えていただきたいと感じています。
さらに、もうひとつ。
Q3:
オクトコプターは、上空でのゲイン変化に強い。
これは、正しい認識ですか?
この質問に、初見で的確に答えられないなら、あなたはオクトコプターの物理特性を理解していることを意味します。
答えられないなら・・・
そういうことです。
それでは、0 [Zero]の見解を以下に示します。
Q1:
オクトコプターは1系統が止まった場合に、どのような条件まで墜落を避けることが出来ますか?
A1:
「障害を起こした左右のモーターが限界に達しない限りは墜落しない」
な~んだ、そんなことか・・・ という回答ですね。
この、「限界」という言葉が非常にくせ者です。
単純なベンチテストでは答えが出せないのです。
当然の事ながら、ベンチでモーター(プロペラ込み)の最大性能は測れます。
バッテリーの消耗や気温変化なども考慮して示すことが可能です。
しかし、機体に実装すると予想データと違った動きをします。
明らかに、予定よりも早い段階で墜落に至ります。
この理由まで答えられれば・・・その方は超一流。
このページも含めてネット上の情報を鵜呑みにする方が多い事から、この質問の回答は敢えて控えます。
そうそう・・・
この質問に答えられない開発者があまりにも多いのが、0 [Zero]の悩みです。
「そんな恐ろしい機体は、とても飛ばせないですね~」という産業機が多すぎます。(国内、国外ともに)
困った事に、この様に設計段階から間違った方向の機体開発に、メディアなどが利用されていたりと・・・
取材する側は素人なので致し方ないのですが、ニュースとなれば我々のような者も目にするのです。
見られていると自覚して行動してください。
Q2:
一系統のモーターが上空で止まったと仮定します。
その機体を呼び戻す際には、どのようなコントロールをすれば良いですか?
A2:
「障害を起こしたモーターを進行方向とする姿勢で呼び戻す」
←M1が前方として解説します。
M1が停止した場合:前進動作で機体を戻す。
M7が停止した場合:右エルロン操作で機体を戻す。
M6が停止した場合:右エルロン+後退操作で機体を戻す。
この時のラダー操作は最大限の注意が必要です。
まずは、停止したモーター方向の負荷を最小とする移動を開始します。
着陸ポイントから離れる方向になる場合でも、ここは絶対です。
その後、最小限のラダー操作で着陸ポイントに向きを変える。
障害発生時に上記の操作を滞りなく行うことを求められるのがオクトコプターです。
運用もフライト技術も一流である必要があるのは言うまでもありません。
オクトコプターを安全に運用するなら、この呼び戻し動作を習得する必要があります。
上空で一系統が止まったと仮定して、様々な舵と組み合わせて反復練習を行います。
理想的には、実際に一系統を上空で止めて訓練すれば完璧でしょう。
なお、この技術が身についたパイロットなら、ワンマンの機体でスイッチバックショットをスムーズに撮影出来るようになります。
つまり、オクトコプターのパイロットはスイッチバックが出来ることが理想です。
上級者から突っ込みが入るかと思いますので補足します。
上記の操作はZ軸重心が浮力重心よりも下にある機体限定です。
理想重心機なら考慮する必要なし。
Z軸重心が浮力重心よりも高い機体なら逆の動きになります。
この様な観点からも、上空でのZ軸重心の可変は御法度なのです。
つまり、バッテリーを上に搭載して上空で何かを切り離す機体。
もしくは、上空で加重が変化する機体。
これらは、その時点でのZ軸加重を意識しながら緊急回避操作をする必要があるという事です。
私は・・・
そんなところまで考慮して回避は出来ませんが、その様な高度な機体を運用する方は出来ていると言う事でしょうか?
Q3:
オクトコプターは、上空でのゲイン変化に強い。
これは、正しい認識ですか?
A3:
「間違っている」
ゲイン変化の耐性にモーター数は関係ありません。
プロペラ効率・重量・Z軸重心位置など、様々な要素によりゲイン変化耐性は決まりますが、モーターの数は関係ありません。
上空でゲイン変化が発生する用途があったとします。
その際の期待選定に、「オクトコプターだから安心」ということはありません。
それよりも、ゲイン変化が発生するペイロードがどの位置に吊されているのか?
この方が遙かに重要な項目です。
◆コラムのまとめ
産業機にオクトコプターという選択は間違っていません。
それで問題ないのですが・・・
ゲイン変化が発生する行為は控えてください。
具体的には、以下が該当します。
・ヒモを付ける
・電線を付ける
・上空で荷物を切り離す
・上空で何かを受取る
・投射面積を大きくする
もしもこれらを業務として行うなら、上記の質問の3つに的確に答えられ事が条件と思います。
答えられれば・・・該当する機体は恐ろしくて飛ばせなくなります。
もちろん、上記のような行為も適切に設計された機体なら問題なく運用出来ます。
しかしながら・・・2016年現在に販売されている産業機で適切に設計されていると感じる期待は少数です。
ほとんどの産業機は設計者自身が瑕疵には気づかずに販売しているという、恐ろしい状態が継続しています。
最終更新日:2016/02/05
ドローン空撮[技術解説] 関連リンク
142) 【特願D】宅配ドローンヘリポート
141) 宅配ドローン着陸姿勢と特願A
140) 宅配ドローン理想重心機と特願A
139) ドローンのデザインとは?
138) バッテリー初期不良の原因特定
137) DJI純正バッテリーの自己放電確認テスト
136) 5機目のDJI PHANTOM2
135) DJIは信用出来るのか?
134) 2016年のDJIクオリティの確認
133) 宅配ドローン実証機制作 その3 特許と許可申請
132) 宅配ドローン実証機制作 その2
131) 宅配ドローン実証機制作 その1
130) 航空法改正
129) 【特願A】実フライトテストNo1
128) 「ドローンから落下させる」機構制作とテスト
127) ドローンの飛行時間について
126) ゲインとは?
125) 首相官邸屋上のドローン落下事故に関して
124) リポバッテリーの検査方法
123) GoProのNDフィルタに関して
122) ホワイトハウス無人機墜落に関する推測
121) 特許出願機の実体化
120) 墜落原因の報告義務について
119) 危険な業者の判断方法
118) 注文者責任のとらえ方の変化に関して
117) マルチコプターが旅客機を墜落させる
116) マルチコプター全面禁止というシナリオ
115) マルチコプター墜落原因の解析について
114) GPSハッキング
113) 管理責任者の表示
112) フライト総重量の明示
111) 湘南国際マラソン墜落事故を考える
110) 雨とリチウムポリマーバッテリー
109) DJI lightbridge テスト開始
108) DJI Phantomd純正プロペラの評価
107) T-MOTOR Antigravity MN2214の評価 その2
106) SUNNYSKY Xシリーズの評価 その2
105) 大型機とFPVの解禁
104) 「螺旋下ろし」で安全な機体回収
103) 固定ピッチのメリットとデメリット おすすめ
102) 3Dプリンタ打ち出し部品を信じるな!
101) 3Dプリンタとマルチコプター
100) 技術解説100ページの区切
99) マルチコプターとPL法
98) スチール撮影用マルチコプター入門
97) リポバッテリー内部検査の理由
96) T-MOTOR Antigravity MN2214の評価
95) SUNNYSKY Xシリーズの評価
94) フルスクラッチマルチコプターのススメ
93) SONY SEL1018は、マルチコプター空撮に使えるか?
92) Amazon Prime Air
91) α7とα7R
90) 動画撮影前提のマルチコプターフライトテクニック
89) 航空法第二条
88) リポバッテリー充電ステーション設計中
87) マルチコプタージャマーについて
86) 空撮屋必修の書籍 :「一般気象学」 おすすめ
85) 電波障害の再検証
84) 空撮会社のノートパソコン
83) マルチコプター空撮機材車
82) 選別落ちリチウムポリマーバッテリーの例
81) プロペラバランスを極める
80) 機材車増車
79) 受注制限に関して
78) ブラシレスジンバル【1.0kgクラス】 業務投入開始
77) ブラシレスジンバル・最初の2週間
76) 1.0kgクラスのジンバル交換
75) 「GoPro HERO3 + ブラシレスジンバル」初フライト
74) ブラシレスジンバル組み付け中
73) パソコンの高性能化により、機体を軽量化?
72) モーターを使い切るノウハウの公開 おすすめ
71) 黎明期から成長期に入ったマルチコプター空撮
70) 夏場の駐車車内の温度上昇対策
69) 「社員パイロット」の責任範囲
68) 「幽かな彼女」ワーク解説
67) マンション眺望撮影専用機体の開発開始
66) コンパクトデジカメの可能性
65) 「フライト重量」は重要な技術スペック
64) 1.0kgクラス・最初の1ヶ月
63) AR.Drone 【屋内ハル】の流用
62) 1.0kgクラス4モーター フレーム再設計
61) 1.0kgクラス4モーター開発経過
60) 屋内限定業務用クアッドコプター開発開始
59) ハンディーカムCX430V導入
58) DJI Wookong-MのGPSアンテナ
57) DJIの品質は大丈夫なのか?
56) フタバ14SGは空撮送信機の定番と成り得るか?
55) サイバーショットDSC-WX200発表
54) リチウムポリマーバッテリーの短絡テスト おすすめ
53) 「科捜研の女」2時間スペシャル撮影例
52) 軽量マルチコプターにベストなカメラは?
51) GTOスペシャルのワーク解説
50) リチウムポリマーバッテリー考察
49) 変電所付近での電波障害
48) ノーファインダー撮影が基本
47) DJI Wookong-Mの暴走原因の特定完了
46) 墜落テスト[2.0kgクラス 6モーター 2012年12月編]
45) DJI Wookong-Mの最新ファームに関して
44) AR.Drone 2.0はブロの撮影に使えるか?
43) プロペラ接触危険率 おすすめ
42) 2.0kgクラス高機動タイプ [Ver2] 開発中
41) 2012年夏のマルチコプター墜落の解説 【このページにて原因の特定説明】
40) 「受注見合わせ」と、「フライト制限」に関して
39) 重量級テスト機体の処分
38) マルチコプターに関する特許出願の内容
37) オクトコプター初フライト
36) 「人物接写空撮」とは?
35) 「2.0kgクラス 6モーター」第一期大規模改修完了
34) 「引きのカット」のカメラ角度について
33) 軽量マルチコプターだから出来ること
32) 0 [Zero]の機体が軽く精度が高い理由
31) マグネシウム合金が理想的なマルチコプターフレーム材
30) 6モーターは危険?安全?
29) 8モーターが安全な理由
28) 4モーターが危険な理由
27) DSLR搭載機開発の一時凍結
26) 初のマルチコプター空撮業務の解説
25) マルチコプターの事故と注文者責任 おすすめ
24) 降雪時のマルチコプター空撮サンプルとは?
23) エクストリーム空撮
22) プロペラバランス
21) リチウムポリマーバッテリー
20) マルチコプターの防振対策
19) JR XG8 本採用
18) モーターテスト用ベンチ制作
17) GoPro HE HERO2 専用ジンバルの試作例
16) 機体設計の方向性
15) ラピド工房
14) DJI Wookong-Mは最新ファームによりトラブル解決
13) αゲルとジンバル
12) 空撮ムービー撮影にフルサイズ一眼は必要なのか?
11) バルーン空撮屋の都合
10) DJI WooKong MとJR・DMSS2.4GHzとの相性?
9) DJI WooKong Mの初期不良確定
8) 犯人はコントローラー?受信機?
7) DJI WooKong Mのトリムズレ
6) 上空フライトテスト
5) 離陸から撮影までの所要時間
4) 実務を想定した弱風条件の動画撮影
3) 1号機にカメラ搭載
2) 最初の一週間
1) マルチコプターの導入