
ドローン空撮[技術解説] - 宅配ドローン着陸姿勢と特願A
2016年11月下旬に、【特願A】 (次世代ドローンの基本特許)が国際公開されます。
2ヶ月後に、【特願G】 (宅配ドローン専用のヘリポート)が続きます。
一連の特許出願に関する技術解説特集です。
宅配ドローンの正しい着陸姿勢
ドローン宅配実現の技術的なハードルは、宅配先への着陸時に集約されます。
複雑な風や障害物は安全な運用を阻みます。
事故の半数以上はここで発生すると、0 [Zero]では考えています。
この対策を含めて2016年11月の段階で3件の宅配ドローン転用可能(一部は完全な宅配専用)な特許出願を完了させています。
これら以外にも出願待ちの宅配ドローン向けの専用特許案を発案しています。
この件に関して興味(共同出願等)がある場合は、お問い合わせ下さい。
今回は、着陸の最後の1mに論点を絞って述べていきます。
なお、着陸には上昇気流対策という別の視点も必要。
こちらは別のページで解説する予定です。
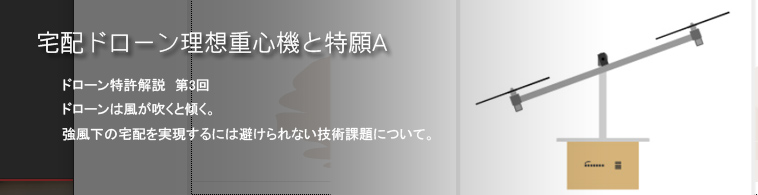
ドローンは、傾く事によりバランスを取っています。
風が吹くと図のような姿勢でホバリングをしています。
従来型のヘリコプター型は、この様な時にも大きく傾くことはありません。
ドローン(マルチコプター)とヘリコプターの特性として理解して下さい。
宅配という観点からドローンの姿勢を考えると着陸時に大きな問題が発生します。
結論から述べると、汎用機は風が吹いているとスムーズに荷物の受け渡しが出来ません。
傾く事でしか横風に対抗する手段が無い以上は、斜めの姿勢のままで着陸します。
着陸直前に脚の片側が地面に付いている条件では、姿勢制御が弱くなります。
ここを回避するには、着陸を短い時間で終わらせるしかありません。
「ポイッ」と荷物を落とすなら良いでしょうが、「丁寧にお届けする」は困難です。
なお、この点に着目してヒモで荷物を吊すという方向性の機体や特許が見て取れます。
このタイプの機体を以降のページ内では、「ヒモ吊り式」と呼びます。
以下に、ヒモ吊り式の特徴を示します。
・機体が傾いても荷物の水平を保つ
・地上とドローンの距離を保つことが可能
ヒモ吊り式は、着陸という観点からは大きな欠点がありません。
ヒモの取り付け位置を浮力重心と近づけると重心変化も発生しません。
ヒモが1本のタイプなら構造もシンプルです。
用途によっては、【特願A=理想重心機】【特願G=宅配専用ドローン】よりも優れている分野も存在します。
【特願G】は、【特願D=宅配ドローンヘリポート】とセットで運用する前提の機体です。
積極的な地上への着陸を推奨していないことから、この点から劣ります。

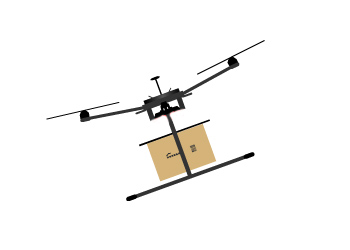
特願A搭載機の着陸姿勢
これが0 [Zero]の回答です。
強風時も着陸脚(荷物)は水平を保つ
積載部はフライト部にジンバル構造で吊られています。
フライト部が傾いても積載部は傾く事がありません。
つまり、どのような風が吹いても着陸脚(荷物)は水平を保ちます。
これなら、スムーズに着陸が可能です。
話は前後しますが、ヒモ吊り式タイプのドローンには特願A搭載宅配ドローンと比較すると欠点があります。
それは、「ヒモを吊すことにより荷物が揺れるという新しい問題が発生」
この事により直径1mのヘリポートに荷物を置くなどという精密着陸を不得意とします。
ここを改善するために複数のヒモを用いると、構造が複雑になるというジレンマが発生します。
シンプルで精密着陸が可能という点が【特願A】が優れる点です。
ただし、この機体も宅配ドローンの本命機ではありません。
コラム:汎用機の強風時の着陸について
ここでは、強風時のドローンの挙動について補足します。
一定以上の経験者を対象とした内容となりますがよろしくお願いします。
以下の前提として述べていきます。
・着陸地点はコンクリートの平面
・着陸地点の平均風速は5m/s
・機体は汎用機ベース
←つまり、これが着陸するという前提です。
読み進めるに為に確認します。
「平均風速5m/sの条件でコンクリートに着陸した経験はありますか?」
この経験が無いと読み進めても意味はありません。
これを機会に無指向性の風速計を購入し、1回でかまいませんので上記の条件を経験してみて下さい。
なお、平均5m/sの風ですので瞬間的には8m/sを超えることもあります。
2016年現在のドローン業界は、風速に関して平均と瞬間の切り分けも出来ていません。
これを機に、この方面の知識も正しく付けていただけると幸いです。
それでは、本題に入ります。
まず、この条件下の機体傾き平均を15度とします。
当然ですが風の強弱により傾きも敏感に変化します。
重量機なら傾きは少なくなる傾向になります。
機体特性にもよりますが、宅配前提の大型機なら平均5m/sでも20度となる事は希でしょう。
もしも、キチンとしたデータを持っているなら、補正をお願いします。
※基本的な結果は変わりません。
解説は地上1m地点から始めます。
1: 風上側の脚の先端が地上に接地(傾き15度)
2: さらに降下を継続すると傾きが浅くなる(傾き10度)
3: 地上を滑りつつ風下に流される(傾き10度)
4: 回復のため上昇(傾き15度)
5: 正しい着陸ポイントに位置修正(傾き15度+)
6: 2からやり直し
空撮機を手動でコントロールしているときには、2~3の状態で強引に着陸しているというのが実情です。
宅配ドローンは当然の事ながら自動着陸前提のシステムです。
3の状態でどのような制御を行うかがSEの腕の見せ所なのですが・・・
どのような優秀なアルゴニズムを考案しても、汎用機なら荒い着陸となるは必然です。
開発者の中には、「脚を滑りにくい形状にすれば良い」などと言うかも知れません。
具体的には、柱状のスキッドです。
この場合は、滑りこそ発生しませんが、転覆というさらに恐ろしい事態が想定出来ます。
ならば、重心を下げて柱状スキッドなどと発想は進むのかも知れませんが・・・
重心を下げると着陸時以外のデメリットが大きくなり、総合的には良い解決方法とは呼べなくなります。
【特願A】や「ヒモ吊り式」は、強風下の着陸を前提として宅配ドローンを考えています。
何度か指摘していますが汎用機ベースでの実証実験は、「気がついていない」か、「気がついていても無視している」かのどちらかです。
開発者的には、どちらの姿勢も問題と感じています。
最終更新日:2016/11/24
ドローン空撮[技術解説] 関連リンク
142) 【特願D】宅配ドローンヘリポート
141) 宅配ドローン着陸姿勢と特願A
140) 宅配ドローン理想重心機と特願A
139) ドローンのデザインとは?
138) バッテリー初期不良の原因特定
137) DJI純正バッテリーの自己放電確認テスト
136) 5機目のDJI PHANTOM2
135) DJIは信用出来るのか?
134) 2016年のDJIクオリティの確認
133) 宅配ドローン実証機制作 その3 特許と許可申請
132) 宅配ドローン実証機制作 その2
131) 宅配ドローン実証機制作 その1
130) 航空法改正
129) 【特願A】実フライトテストNo1
128) 「ドローンから落下させる」機構制作とテスト
127) ドローンの飛行時間について
126) ゲインとは?
125) 首相官邸屋上のドローン落下事故に関して
124) リポバッテリーの検査方法
123) GoProのNDフィルタに関して
122) ホワイトハウス無人機墜落に関する推測
121) 特許出願機の実体化
120) 墜落原因の報告義務について
119) 危険な業者の判断方法
118) 注文者責任のとらえ方の変化に関して
117) マルチコプターが旅客機を墜落させる
116) マルチコプター全面禁止というシナリオ
115) マルチコプター墜落原因の解析について
114) GPSハッキング
113) 管理責任者の表示
112) フライト総重量の明示
111) 湘南国際マラソン墜落事故を考える
110) 雨とリチウムポリマーバッテリー
109) DJI lightbridge テスト開始
108) DJI Phantomd純正プロペラの評価
107) T-MOTOR Antigravity MN2214の評価 その2
106) SUNNYSKY Xシリーズの評価 その2
105) 大型機とFPVの解禁
104) 「螺旋下ろし」で安全な機体回収
103) 固定ピッチのメリットとデメリット おすすめ
102) 3Dプリンタ打ち出し部品を信じるな!
101) 3Dプリンタとマルチコプター
100) 技術解説100ページの区切
99) マルチコプターとPL法
98) スチール撮影用マルチコプター入門
97) リポバッテリー内部検査の理由
96) T-MOTOR Antigravity MN2214の評価
95) SUNNYSKY Xシリーズの評価
94) フルスクラッチマルチコプターのススメ
93) SONY SEL1018は、マルチコプター空撮に使えるか?
92) Amazon Prime Air
91) α7とα7R
90) 動画撮影前提のマルチコプターフライトテクニック
89) 航空法第二条
88) リポバッテリー充電ステーション設計中
87) マルチコプタージャマーについて
86) 空撮屋必修の書籍 :「一般気象学」 おすすめ
85) 電波障害の再検証
84) 空撮会社のノートパソコン
83) マルチコプター空撮機材車
82) 選別落ちリチウムポリマーバッテリーの例
81) プロペラバランスを極める
80) 機材車増車
79) 受注制限に関して
78) ブラシレスジンバル【1.0kgクラス】 業務投入開始
77) ブラシレスジンバル・最初の2週間
76) 1.0kgクラスのジンバル交換
75) 「GoPro HERO3 + ブラシレスジンバル」初フライト
74) ブラシレスジンバル組み付け中
73) パソコンの高性能化により、機体を軽量化?
72) モーターを使い切るノウハウの公開 おすすめ
71) 黎明期から成長期に入ったマルチコプター空撮
70) 夏場の駐車車内の温度上昇対策
69) 「社員パイロット」の責任範囲
68) 「幽かな彼女」ワーク解説
67) マンション眺望撮影専用機体の開発開始
66) コンパクトデジカメの可能性
65) 「フライト重量」は重要な技術スペック
64) 1.0kgクラス・最初の1ヶ月
63) AR.Drone 【屋内ハル】の流用
62) 1.0kgクラス4モーター フレーム再設計
61) 1.0kgクラス4モーター開発経過
60) 屋内限定業務用クアッドコプター開発開始
59) ハンディーカムCX430V導入
58) DJI Wookong-MのGPSアンテナ
57) DJIの品質は大丈夫なのか?
56) フタバ14SGは空撮送信機の定番と成り得るか?
55) サイバーショットDSC-WX200発表
54) リチウムポリマーバッテリーの短絡テスト おすすめ
53) 「科捜研の女」2時間スペシャル撮影例
52) 軽量マルチコプターにベストなカメラは?
51) GTOスペシャルのワーク解説
50) リチウムポリマーバッテリー考察
49) 変電所付近での電波障害
48) ノーファインダー撮影が基本
47) DJI Wookong-Mの暴走原因の特定完了
46) 墜落テスト[2.0kgクラス 6モーター 2012年12月編]
45) DJI Wookong-Mの最新ファームに関して
44) AR.Drone 2.0はブロの撮影に使えるか?
43) プロペラ接触危険率 おすすめ
42) 2.0kgクラス高機動タイプ [Ver2] 開発中
41) 2012年夏のマルチコプター墜落の解説 【このページにて原因の特定説明】
40) 「受注見合わせ」と、「フライト制限」に関して
39) 重量級テスト機体の処分
38) マルチコプターに関する特許出願の内容
37) オクトコプター初フライト
36) 「人物接写空撮」とは?
35) 「2.0kgクラス 6モーター」第一期大規模改修完了
34) 「引きのカット」のカメラ角度について
33) 軽量マルチコプターだから出来ること
32) 0 [Zero]の機体が軽く精度が高い理由
31) マグネシウム合金が理想的なマルチコプターフレーム材
30) 6モーターは危険?安全?
29) 8モーターが安全な理由
28) 4モーターが危険な理由
27) DSLR搭載機開発の一時凍結
26) 初のマルチコプター空撮業務の解説
25) マルチコプターの事故と注文者責任 おすすめ
24) 降雪時のマルチコプター空撮サンプルとは?
23) エクストリーム空撮
22) プロペラバランス
21) リチウムポリマーバッテリー
20) マルチコプターの防振対策
19) JR XG8 本採用
18) モーターテスト用ベンチ制作
17) GoPro HE HERO2 専用ジンバルの試作例
16) 機体設計の方向性
15) ラピド工房
14) DJI Wookong-Mは最新ファームによりトラブル解決
13) αゲルとジンバル
12) 空撮ムービー撮影にフルサイズ一眼は必要なのか?
11) バルーン空撮屋の都合
10) DJI WooKong MとJR・DMSS2.4GHzとの相性?
9) DJI WooKong Mの初期不良確定
8) 犯人はコントローラー?受信機?
7) DJI WooKong Mのトリムズレ
6) 上空フライトテスト
5) 離陸から撮影までの所要時間
4) 実務を想定した弱風条件の動画撮影
3) 1号機にカメラ搭載
2) 最初の一週間
1) マルチコプターの導入