
ドローン空撮[技術解説] - DJI Wookong-Mの最新ファームに関して

[2.0kgクラス 6モーター]の最新版となるVer2は実務導入前のテスト段階に入っています。
Ver2の2号機ではフライトコントローラーに変化があります。
今まで通り、DJIのWookong_Mを採用していますがファームウェアを最新世代としています。
実は最初期の開発時には頻々にファームウェアを更新していましたが一定の安定を見た後はファームウェアの更新は凍結していました。
Wookong_Mのテスト購入の際には事前の情報で最新ファームにアップしたことによりトラブル発生という実例は持っていました。(コンピュータの世界では良くあること)
ファームウェアのアップデートによる不確定要素を除くという観点から、0 [Zero]では積極的なファームアップは行っていません。(永遠に、このポリシーはかわりません)

しかし・・・
Ver2化は実務性能のアップも性能要項のひとつ。
車両には即時フライト可能な状況にて2機を用意する事と決めていました。
※Ver1世代では組み立て式の8モーターがバックアップ。
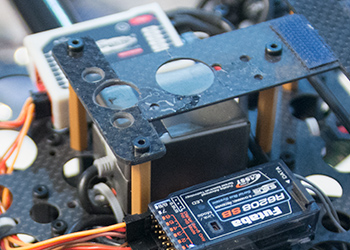
←早い段階で、6モーター2機は実体化。その2機にて、車両の搭載方法を検討中の写真です。
この2号機はWookng_Mを新規に購入したことから、結果として最新のファームウェアになっています。
世代的には10ヶ月の隔たりがあることから、当然ですが別物として考えるべきところ。
「必要なテストを繰り返してからでないと実務に投入できないな・・・」と開発者は考えていました。
2号機の組み立て後も、実務は1号機とバックアップの8モーターにて行っていました。
どちらも、信頼性がおける凍結されたファームウェアです。
2012年11月の後半に、天候が荒れたこととにより予定していたバルーン空撮業務が延期となりました。
これにより、数日間の集中メンテナンス時間が確保出来ました。
メンテナンスの目的は最新ファームウェアの確認です。

最新ファームの第一印象は良好な物。
セットアッププログラムの改修は実用機能の追加が見て取れます。
10ヶ月前のバージョンと同等の数値をオートパイロット項目には入力。
上空を含む、簡易的なテストでは問題は無し。
2号機はアームの長さが想定範囲で最大。重量バランスは過去の6モーターでは最良という機体セッティングになっています。
アームが長いと言う事は制御が敏感に働く事を意味します。
同じオートパイロットの設定値ではハンチングを起こす方向に働く事を意味します。
静バランスの改善はこの逆の方向に働きます。
また、上空での樹木接触などのトラブルを想定し、異常傾斜のテストを行ったところ・・・
旧ファームとは異なる危険なモーター動作が確認出来ました。
具体的にはCut Off Typeがインテリジェントモードでもモーターを止めない事が確認出来ました。
これ以外にもデフォルト設定には疑問が残るところが多く・・・
つまりは最新ファームウェア搭載機はハンチングが再現されるまで機体を追い込む必要が有る。
特定条件下では想定外の方向に短距離の暴走はあり得る。
もう少し言いますと、「墜落テストを実施する必要性が有る」とい結論に達しました。
1回目墜落
最初に常識の範囲でオートパイロット項目を設定。(通常の操作ではハンチングを絶対に起こさない数値)
次にマルチコプターの弱点であるラダー方向のオートパイロット値をハンチングを起こすまで上げる。
上空にて、ラダーハンチング状態を起こさせた後に、急激なエレベーター操作。
上記にて、1回目の墜落発生
狙いは限界を狙った設定にてトラブルが発生しないかのテスト。
もしも、耐えた場合はさらに条件を厳しくし致命的なトラブルに発展するまでテストを繰り返す。
ハンチング時のロック性能を試す為のテストですので・・・初回からの墜落もムリも無いと考えています。
2回目墜落
ラダーは、「甘い」と感じるレベルまで、大幅に設定値を下げる。(ラダーは甘いくらいが撮影実務ではベスト)
エレベーターとエルロンも、設定値を下げる。
つまり、安全性を十分に確保した甘いセッティングから辛い方向に攻めていきながら限界を探るという方向です。
1回目墜落と同様に、ラダー最大舵の状態にて急激なエレベーター操作=問題無し。
強風時のGPSフライト時の急激な危険回避操作をイメージした、意地悪なエレベーター操作の実施=2回目の墜落
墜落まで至らないという予想の元でのテストでした。
少なくとも、旧ファームを搭載する実務機では通常の範囲としている操作です。
つまり、旧ファームウェアでは耐えられる設定です。(旧ファームにて実務に用いている設定値よりも甘い)
これが意味するのは旧ファームを最新にアップデートすると・・・今までと同じ条件下でトラブル(墜落)する事を意味します。
機体は一切の変更無し。ファームを触っただけで墜落の危険性増大。
もちろん、これは問題です。
恐らく、DJIの開発者も実施しないバク取りです。
多くのユーザーも体験しない事と思うので、そこまで重要とは思いませんが・・・
風速10m/s条件下の実務を想定している0 [Zero]にとっては問題です。
最新ファームも含めたDJIに関して
10ヶ月ぶりに購入したWookong_Mは見えない部分の改修が施されていました。
例えば・・・LEDインディケーターがシールド線になっているとか・・・
もちろん、シールド線はノイズ対策です。
※0 [Zero]では新品でも内部まで検査しています。
←2012年8月頃の、2.0kg 6モーター(1号機)
2012年夏のマルチコプター墜落の後なので、IMUにはノイズ対策が施されていました。
※この対策方法は有効で無いことを後日確認。
後からノイズ対策のラインを採用してくるのですから・・・
DJI側でも、ノイズ起因のトラブル発生は承知していると言えます。
ノイズ対策とも連動していると思われますが非常時のモーター停止機能も変更が入っています。
この部分はノウハウに該当するところなので具体的な記述はさけますが・・・
Wookohg_Mを使っている方は0 [Zero]の様に墜落テストを実施することをおすすめします。
※現場に最適な設定をご自分の意志で行ってください。(デフォルト設定では危険です)
制御プログラムのクセ(限界時に粘ろうとする)や、ハードウェア改修(ノイズ対策)。
初期設定では異常傾斜後もプロペラ制御を止めないのは・・・
0 [Zero]が経験したトラブル(上空での想定外のプロペラ停止)などが実際に発生しているからと読み取れます。
つまり、ラインからノイズなどが入りIMU自身のセンターが狂う。
これが異常傾斜と判断されるレベルに達するとモーターを止めてしまうのが旧ファーム。
新ファームでは復旧まで粘ろうとしていると読めました。
最新ファームウェアは口当たりは良くなっています。
1年前と比べると、素人的には、「良く飛ぶな~」という印象を抱けるファーム(ハード)だと思います。
しかし・・・
性能の、「のりしろ」を使い切っている感があることから、限界時の挙動は非常に読みにくくなりました。
本来なら旧ファームで実務機を揃えたいのですが現実的には不可能です。
新ファームにて、安定する方向を探り全ての機体に対して新ファームを当てることになります。
新ファームでは墜落リスクは上がる事は確定なのですが・・・
実務の機体に異なるファームが点在する方がより高いリスクです。
なお、このタイミングでS800に関する個人的な見解を記しておきます。
「歴史に残る愚作」
この様に評価します。
素人が普通に飛ばすには良好かと思います。
「有り余る余剰浮力による信頼性」
これは0 [Zero]の実務機と基本コンセプトは同一。
実際にフライトさせた経験はありませんがスティックの付きが良いことは容易に想像できます。
それではなぜ「歴史に残る愚作」という過激な表現に至ったのか?
それは以下の具体的な2点にて指摘出来ます。
・適正重心を無視したフレーム設計
・フレーム設計の瑕疵をカバーするモーターオフセット
現段階(2012年12月)では意味がわからない方がほとんどかと思いますが・・・
いづれ発表されるS800の後続機などでは上記の2点が改善されるハズです。
恐らく、10年後のマルチコプターフレームの常識ではS800が悪い例として取り上げられる事でしょう。
この1年間でDJIに対するイメージは悪い方向に変わりました。(それでも使い続けますが・・・)
S800にてDJIの開発者にはラジコン飛行機をフルスクラッチで製作できるレベルの方は一名もいないことが証明されました。
DJI目線で述べると、「撮る性能を重視した、撮影の為の機体」
私目線で述べると、「撮る性能にも、安全性にも改良の余地は有り余っている機体」
今回のファームウェアとも絡むのですがS800なら一発でノーコン墜落の再現が可能です。
もちろん、ハンチングなどを起こさない常識のセッティングの範囲にてです。
「実際のフライトではそんな無茶な操作はしないから無意味なテストでは?」と思う方もいるでしょう?
しかし、今回のテスト(エレベーターの最大舵の往復)は実務でも十分あり得る操作なのです。
GPSモードにて向かい風方向に向かっての全速前進。
その後、全速で後退。
操縦者が驚いて、回避(後退から前進)操作。
上記の操作で、タイミングが合うとS800はフリップに入ります。
なお、旧ファームでは異常傾斜の検出にてモーター停止。
このテストに用いたファームではフリップに入ってもモーターは稼働。
テストとは想定される最大の負荷にて実施されるのが当然です。
ラボの中に籠もっていては本当に良いシステムはつくることが出来ません。
例えば耐久テストなども・・・
最も電気的に負荷がかかる電源投入時と、モーター始動時を集中的にテスト。
冷間・温間。
親バッテリーの鮮度。
ジンバルサーボなどに想定最大の電流の供給。
「何十時間ホバリングしました」などというテストは・・・意味が薄い事は言うまでもありません。
仮にラインからノイズが入る事を気にするなら・・・
ユーザーが用意するジンバル制御のサーボなどにも、ノイズ対策は必要です。
(0 [Zero]では意識しています)
Wookong_Mと一年付き合ってわかりましたが・・・
DJIという会社はラボに閉じこもるタイプの会社です。
確かに、思考の速度ははやい。
しかし・・・間違っていても、そのまま市場に出してしまうという傾向がある。
その、間違いは改善される事も多いのも事実なのですが・・・
プロの空撮機材メーカーとしては問題であると考えています。
0 [Zero]では今後もDJI製品を使うことになると思います。
今回の様な、「大規模な改善」(褒めていません)が施されていると思われる場合は必要な社内テストは実施します。
また、DJI製品をパーツレベルでスペアにすると言う事も一切しません。
必ず、機体に組み付けて必要なテストを実施してから実務投入(スペア)という動きを取ることをお約束します。
最終更新日:2013/01/03
ドローン空撮[技術解説] 関連リンク
142) 【特願D】宅配ドローンヘリポート
141) 宅配ドローン着陸姿勢と特願A
140) 宅配ドローン理想重心機と特願A
139) ドローンのデザインとは?
138) バッテリー初期不良の原因特定
137) DJI純正バッテリーの自己放電確認テスト
136) 5機目のDJI PHANTOM2
135) DJIは信用出来るのか?
134) 2016年のDJIクオリティの確認
133) 宅配ドローン実証機制作 その3 特許と許可申請
132) 宅配ドローン実証機制作 その2
131) 宅配ドローン実証機制作 その1
130) 航空法改正
129) 【特願A】実フライトテストNo1
128) 「ドローンから落下させる」機構制作とテスト
127) ドローンの飛行時間について
126) ゲインとは?
125) 首相官邸屋上のドローン落下事故に関して
124) リポバッテリーの検査方法
123) GoProのNDフィルタに関して
122) ホワイトハウス無人機墜落に関する推測
121) 特許出願機の実体化
120) 墜落原因の報告義務について
119) 危険な業者の判断方法
118) 注文者責任のとらえ方の変化に関して
117) マルチコプターが旅客機を墜落させる
116) マルチコプター全面禁止というシナリオ
115) マルチコプター墜落原因の解析について
114) GPSハッキング
113) 管理責任者の表示
112) フライト総重量の明示
111) 湘南国際マラソン墜落事故を考える
110) 雨とリチウムポリマーバッテリー
109) DJI lightbridge テスト開始
108) DJI Phantomd純正プロペラの評価
107) T-MOTOR Antigravity MN2214の評価 その2
106) SUNNYSKY Xシリーズの評価 その2
105) 大型機とFPVの解禁
104) 「螺旋下ろし」で安全な機体回収
103) 固定ピッチのメリットとデメリット おすすめ
102) 3Dプリンタ打ち出し部品を信じるな!
101) 3Dプリンタとマルチコプター
100) 技術解説100ページの区切
99) マルチコプターとPL法
98) スチール撮影用マルチコプター入門
97) リポバッテリー内部検査の理由
96) T-MOTOR Antigravity MN2214の評価
95) SUNNYSKY Xシリーズの評価
94) フルスクラッチマルチコプターのススメ
93) SONY SEL1018は、マルチコプター空撮に使えるか?
92) Amazon Prime Air
91) α7とα7R
90) 動画撮影前提のマルチコプターフライトテクニック
89) 航空法第二条
88) リポバッテリー充電ステーション設計中
87) マルチコプタージャマーについて
86) 空撮屋必修の書籍 :「一般気象学」 おすすめ
85) 電波障害の再検証
84) 空撮会社のノートパソコン
83) マルチコプター空撮機材車
82) 選別落ちリチウムポリマーバッテリーの例
81) プロペラバランスを極める
80) 機材車増車
79) 受注制限に関して
78) ブラシレスジンバル【1.0kgクラス】 業務投入開始
77) ブラシレスジンバル・最初の2週間
76) 1.0kgクラスのジンバル交換
75) 「GoPro HERO3 + ブラシレスジンバル」初フライト
74) ブラシレスジンバル組み付け中
73) パソコンの高性能化により、機体を軽量化?
72) モーターを使い切るノウハウの公開 おすすめ
71) 黎明期から成長期に入ったマルチコプター空撮
70) 夏場の駐車車内の温度上昇対策
69) 「社員パイロット」の責任範囲
68) 「幽かな彼女」ワーク解説
67) マンション眺望撮影専用機体の開発開始
66) コンパクトデジカメの可能性
65) 「フライト重量」は重要な技術スペック
64) 1.0kgクラス・最初の1ヶ月
63) AR.Drone 【屋内ハル】の流用
62) 1.0kgクラス4モーター フレーム再設計
61) 1.0kgクラス4モーター開発経過
60) 屋内限定業務用クアッドコプター開発開始
59) ハンディーカムCX430V導入
58) DJI Wookong-MのGPSアンテナ
57) DJIの品質は大丈夫なのか?
56) フタバ14SGは空撮送信機の定番と成り得るか?
55) サイバーショットDSC-WX200発表
54) リチウムポリマーバッテリーの短絡テスト おすすめ
53) 「科捜研の女」2時間スペシャル撮影例
52) 軽量マルチコプターにベストなカメラは?
51) GTOスペシャルのワーク解説
50) リチウムポリマーバッテリー考察
49) 変電所付近での電波障害
48) ノーファインダー撮影が基本
47) DJI Wookong-Mの暴走原因の特定完了
46) 墜落テスト[2.0kgクラス 6モーター 2012年12月編]
45) DJI Wookong-Mの最新ファームに関して
44) AR.Drone 2.0はブロの撮影に使えるか?
43) プロペラ接触危険率 おすすめ
42) 2.0kgクラス高機動タイプ [Ver2] 開発中
41) 2012年夏のマルチコプター墜落の解説 【このページにて原因の特定説明】
40) 「受注見合わせ」と、「フライト制限」に関して
39) 重量級テスト機体の処分
38) マルチコプターに関する特許出願の内容
37) オクトコプター初フライト
36) 「人物接写空撮」とは?
35) 「2.0kgクラス 6モーター」第一期大規模改修完了
34) 「引きのカット」のカメラ角度について
33) 軽量マルチコプターだから出来ること
32) 0 [Zero]の機体が軽く精度が高い理由
31) マグネシウム合金が理想的なマルチコプターフレーム材
30) 6モーターは危険?安全?
29) 8モーターが安全な理由
28) 4モーターが危険な理由
27) DSLR搭載機開発の一時凍結
26) 初のマルチコプター空撮業務の解説
25) マルチコプターの事故と注文者責任 おすすめ
24) 降雪時のマルチコプター空撮サンプルとは?
23) エクストリーム空撮
22) プロペラバランス
21) リチウムポリマーバッテリー
20) マルチコプターの防振対策
19) JR XG8 本採用
18) モーターテスト用ベンチ制作
17) GoPro HE HERO2 専用ジンバルの試作例
16) 機体設計の方向性
15) ラピド工房
14) DJI Wookong-Mは最新ファームによりトラブル解決
13) αゲルとジンバル
12) 空撮ムービー撮影にフルサイズ一眼は必要なのか?
11) バルーン空撮屋の都合
10) DJI WooKong MとJR・DMSS2.4GHzとの相性?
9) DJI WooKong Mの初期不良確定
8) 犯人はコントローラー?受信機?
7) DJI WooKong Mのトリムズレ
6) 上空フライトテスト
5) 離陸から撮影までの所要時間
4) 実務を想定した弱風条件の動画撮影
3) 1号機にカメラ搭載
2) 最初の一週間
1) マルチコプターの導入